I came to Udacity three years ago to build the Self-Driving Car Engineer Nanodegree Program. Since then, we’ve had thousands of students enroll in and graduate the program, and we’ve built other Nanodegree programs:
My Udacity colleagues Leah Wiedenmann and Vienna Harvey compiled a list of female leaders in the automotive industry. Their goal is to help more conferences invite female speakers.
I imagine this list will be helpful to journalists and researchers, as well.
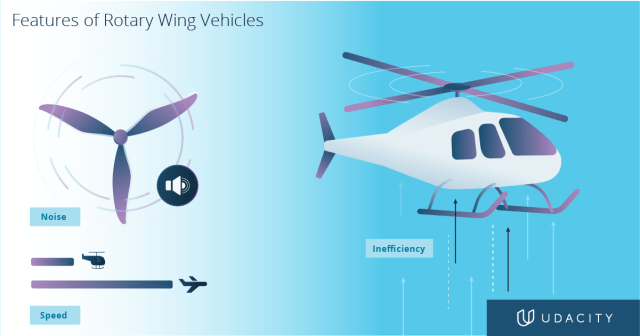
You might be able to deduce the strengths and weaknesses of each modality from these nifty graphics, but you should read the whole post for more 😊 🚁 ✈️
“Neolix, a start-up so Chinese that it has only barely has an English-language website, has announced mass-production of its autonomous delivery vehicles and declared itself the first company in the world to do this, according to Bloomberg.”
“Perhaps radar is even underappreciated. Venture capital has flowed into lidar and camera-based solutions for automated vehicles; radar has been viewed as a commodity.”
That seems right to me.
The article highlights three companies working on different approaches to more advanced radar for self-driving cars. The work from Bosch to create radar-based high-definition maps seems particularly interesting.
“By coupling these two inputs [radar and GPS], Bosch’s system can take that real-time data and compare it to its base map, match patterns between the two, and determine its location with centimeter-level accuracy.”
Bosch calls this approach, “radar road signature” and posits that it can provide centimeter-level accuracy while using half as much data as a camera-based map.
Bosch is highlighting their work with TomTom to build radar-based HD maps. They divide these maps into three layers:
Localization: calculating where the car is in the world
Planning: deciding which actions are available to the car
Dynamic: predicting what other actors in the environment will do
This is exciting work because high-definition (HD) maps are usually the domain of lidar. Lidar point clouds are used to generate maps against which a vehicle can compare later sensor readings.
Some work has gone into attempts to build such maps with camera data. Visual SLAM is one example of this. By comparison, relatively little work has gone into building HD maps from radar data. That makes Bosch’s endeavor novel and exciting.
Bosch is positioning this as a fleet-based mapping system, with map data generated by ordinary consumer cars, not necessarily specialized mapping vehicles. It’s hard to know how realistic that really is, but it would play to Bosch’s strength of scale.
“One million vehicles will keep the high-resolution map up to date.”
As the world’s largest automotive supplier, Bosch has a unique ability to pump a success into the automotive market.
Ford CTO Ken Washington, who used to be like my boss’s boss’s boss’s boss’s boss when I was at Ford, and seems like a great guy, has a post up about Digit, a humanoid robot that Ford is working on for last-mile deliveries.
Reading the post and watching the video, I have a few reactions:
This is awesome.
This will be insanely hard.
Giving a robot a lidar for a head is a stroke of genius, at least from an aesthetic perspective.
Ford is completely right that the last-mile (really, last-ten-yards) delivery problem is going to be a huge issue. Right now logistics companies rely on drivers to both operate a vehicle and to walk deliveries to customers’ front doors. Self-driving cars solve the first problem, but in a lot of cases that won’t ultimately have much of an impact if we can’t solve the second task.
So the motivation for Digit is spot-on.
But walking robots are bananas-level difficult.
Look no further than this video with the awesome title, “A Compilation of Robots Falling Down at the DARPA Robotics Challenge”:
Granted, this video is from 4 years ago and progress has been made, but my impression is that walking robots make self-driving cars look like an easy problem.
I remember taking an edX course from Russ Tedrake at MIT called “Underactuated Robotics” that was concerned with, among other things, walking robots. This course was so, so hard. The control problems inherent in a multi-joint, walking robot are of a staggering level of mathematical complexity.
Digit’s demo video is awesome, but we’ve all learned to be skeptical of demo videos. If Ford, together with Agility Robotics, can really crack the nut on a walking robot that can deliver packages, then they won’t even need to solve the autonomous vehicle problem. They’ll have the whole world beating down their door.