Enjoy a look at some of the projects our students are building, including Finding Lane Lines, Traffic Sign Classifier, Behavioral Cloning, and more!

Students in our Self-Driving Car Engineer Nanodegree program engage in a project-based curriculum, and from the moment they enroll, they begin addressing key challenges and topics through building specialized projects. Here are all of the projects they build!
Finding Lane Lines
This is the first project students complete, one week into the program.
They learn to work with images, color spaces, thresholds, and gradients, in order to find lane lines on the road.
Stack: Python, NumPy, OpenCV
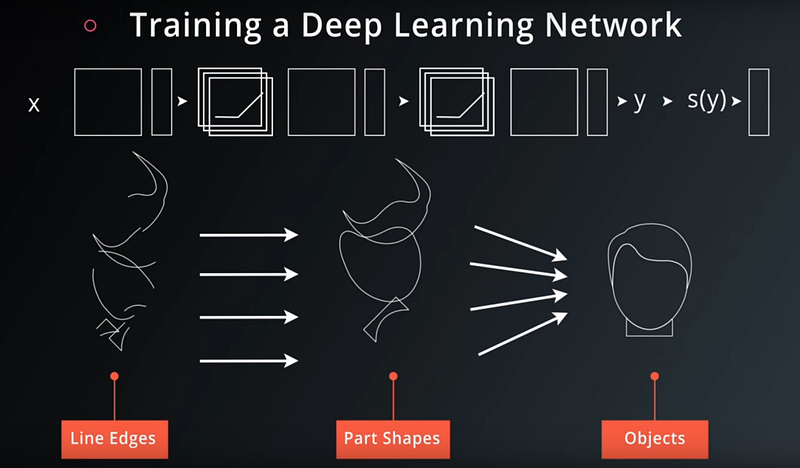
Traffic Sign Classifier
In this project, students train a convolutional neural network to classify traffic signs.
To do so, they use the German Traffic Sign Recognition Benchmark dataset. This particular student went above and beyond to train his network to not only classify signs, but also localize them within the image, and applied his classifier to a video.
Stack: Python, NumPy, TensorFlow
Behavioral Cloning
Here, students record training data by manually driving a car around a track in a simulator.
Then they use this camera, steering, and throttle data to train an end-to-end neural network for driving the vehicle, based on NVIDIA’s famous research paper.
Stack: Python, NumPy, Keras
Advanced Lane Finding
By applying advanced computer vision techniques, such as sliding window tracking, to a dashcam video, students are able to track lane lines on the road under a variety of challenging conditions.
Stack: Python, NumPy, OpenCV
Vehicle Detection and Tracking
Students use machine learning techniques and feature extraction to identify and track vehicles on a highway.
Stack: Python, NumPy, scikit-learn, OpenCV
Extended Kalman Filter
An extended Kalman filter merges noisy simulated radar and lidar data to track a vehicle.
Stack: C++, Eigen
Unscented Kalman Filter
An unscented Kalman filter merges noisy, highly non-linear simulated radar and lidar data to track a vehicle.
Stack: C++, Eigen
Kidnapped Vehicle
Students develop a particle filter in C++ to probabilistically determine a vehicles location relative to a sparse landmark map.
Stack: C++
PID Controller
Students build and tune a proportional-integral-derivative controller to steer a vehicle around a test track, following a target trajectory.
Stack: C++
Model Predictive Control
Students build and optimize a model predictive controller to steer a vehicle around a test track, following a target trajectory.
Stack: C++, ipopt
Path Planning
In this project, students construct a path planner for highway driving based on a finite state machine.
The planner has three components: environmental prediction, maneuver selection, and trajectory generation.
Stack: C++
Semantic Segmentation
Students train a pixel-wise segmentation network that identifies and colors road pixels to identify free space for driving.
Stack: Python, TensorFlow
Safety Case

Students build a prototype of a safety case for a lane-keeping assistance ADAS feature, including the safety plan, hazard analysis and risk assessment, functional safety concept, technical safety concept, and software requirements.
Programming a Real Self-Driving Car
For this project, students form teams to drive a real self-driving car around the Udacity test track.
The car is required to negotiate a traffic light and follow a waypoint trajectory. Code is built first in the simulator, and then deployed to Udacity’s self-driving car in California.
Stack: Python, ROS, Autoware, TensorFlow
Would you like to be building these kinds of projects yourself? Then you should apply to the Udacity Self-Driving Car Engineer Nanodegree Program!