They cover AI, transportation, digital medicine, autonomous flight, Udacity, the future of technology, and more. You even get to hear Sebastian talk about a refrigerator flirting with a dishwasher.
(I contributeForbes.com; it’s a stretch to call Steve Forbes my “boss”. I’ve actually never met Steve Forbes myself, but just go with it.)
After four and a half years, today is my last day at Udacity. On Monday, I will return to my roots in core self-driving car engineering. I’m excited!
Udacity has been the most successful and fun experience of professional life. I leave with memories of amazing students, terrific colleagues, and work of which I am proud.
I am so grateful to Sebastian Thrun and the Udacity team for recruiting me here in 2016. Together we built the Self-Driving Car Engineer Nanodegree Program, which has trained thousands of autonomous vehicle engineers, along many other amazing programs an courses, ranging from artificial intelligence to data science to web development to cloud computing, and beyond.
This small collection of photos captures a few of my many wonderful experiences with this amazing company.
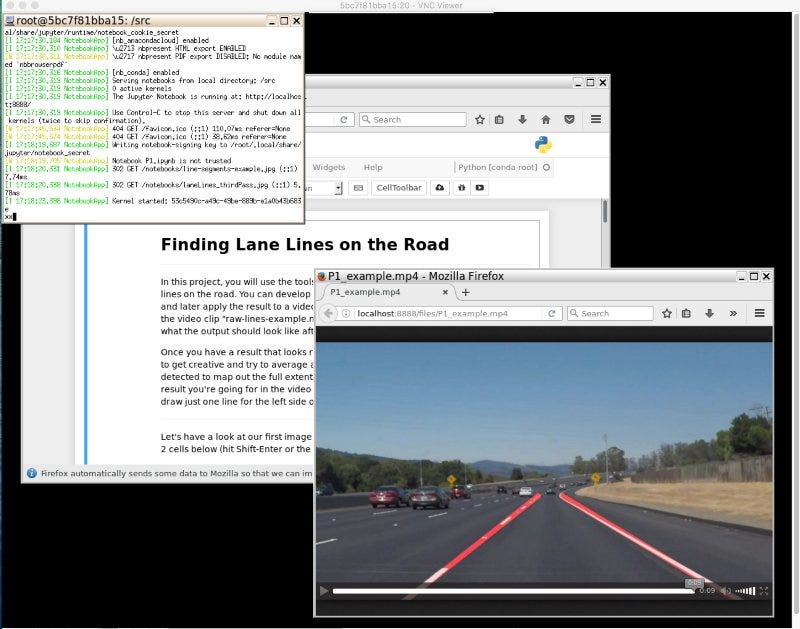
The 2016 SDC Pre-Launch Dashboard!Launching at TechCrunch Disrupt 2016!Finding Lane Lines — the first Self-Driving Car ProjectRyan Keenan building Self-Driving Car projectsThe first Self-Driving Car Team Retreat in Pajaro DunesMeeting Udacity students in DetroitWe won the first Udaciward!Meeting Udacity students in TokyoUdaciward Outing: NASCAR in SonomaTeaching with Lufthansa’s FlyingLab at 30,000 feet!Filming the final video!We finished the Self-Driving Car Engineer Nanodegree Program!Graduation!Brok and the team went crazy for my birthday!Autonomous Day at the Porsche Experience CenterInterviewing Sebastian Thrun for Udacity TalksWorking with the Infosys self-driving golf cart in Mysore, India!Filming with the Baidu Apollo teamTeaching self-driving cars at the Navimotive Conference in Ukraine!Presenting at NIO House in HangzhouSouth by Southwest!The last School of Autonomous Systems Team Retreat, in San Francisco!Interviewing C++ creator Bjarne StroustrupLive Teaching Samples!Curriculum Team Q4 2019 Retreat in the redwoodsThe Curriculum Team escaped!Super Chris Vasquez!We completed Los Pollos Hermanos Employee Training!Ask Me Anything!Farewell Karaoke!
Udacity is full of such wonderful people! My colleagues made me an amazing farewell video 🙂
I’m a little self-conscious about sharing it, because it’s hardly modest. But the video is a tour in and of itself through my time at Udacity, and it makes me so happy and proud.
If you pay attention, you can even get some hints about what I’ll be up to next 😉
On Wednesday, 10–11am PT, I’ll take over the Udacity Twitter account to host an AMA about robotics and automation in the post-COVID19 world. Or, anything else you’d like to ask!
This is outside my usual wheelhouse of autonomous vehicles and robotics, but I played a significant (albeit behind-the-scenes) role teaching the first course in the three-course program.
Tom Verbiscer and I worked together to design and build a sequence of lessons on high-availability, resilience, and redundancy. Tom teaches about:
Availability Zones
Regions
Server-based architecture
Serverless architecture
Global services
DynamoDB and global tables
S3 classes and features
Uptime
Downtime
Service-Level Agreements
Recovery Time Objectives
Recovery Point Objectives
Disaster Recovery
Monitoring with CloudWatch
Alerting with Simple Notification Service
Recovery
Chaos Engineering!
And that’s just the first course of the program!
I hope everyone that enrolls learns as much from taking the program as I did working with Tom to build the program.
We hear from a lot of Udacity students about their experiences in our programs — the good and the bad. Both positive and negative feedback are valuable, and it’s always nice to hear when we’ve done a good job.
I came to Udacity three years ago to build the Self-Driving Car Engineer Nanodegree Program. Since then, we’ve had thousands of students enroll in and graduate the program, and we’ve built other Nanodegree programs:
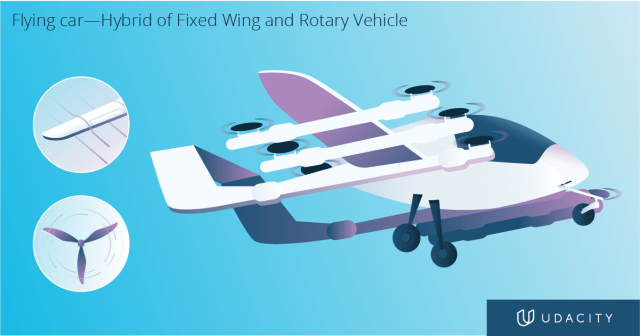
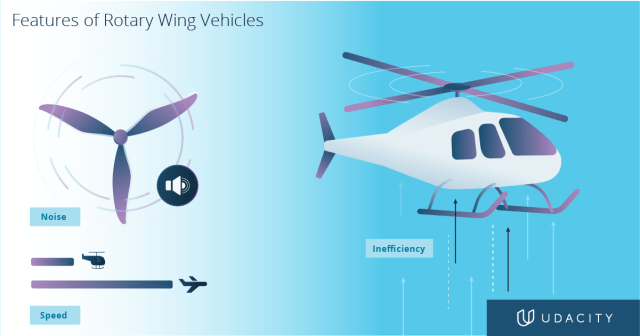
You might be able to deduce the strengths and weaknesses of each modality from these nifty graphics, but you should read the whole post for more 😊 🚁 ✈️
The goal of this program is to offer a much deeper dive into perception and sensor fusion than we were able to do in our core Self-Driving Car Engineer Nanodegree Program. This is a great option for students who want to develop super-advanced, cutting-edge skills for working with lidar, camera, and radar data, and fusing that data together.
The first three months of the program are brand new content and projects that we’ve never taught before. The final month, on Kalman filters, comes from our core Self-Driving Car Nanodegree Program. The course is designed to last four months for new students. Students who have already graduated the core Self-Driving Car Engineer Nanodegree Program should be able to finish this specialized Sensor Fusion Nanodegree Program in about three months.
Curriculum
Course 1: Lidar Instructor:Aaron Brown, Mercedes-Benz Lesson: Introduction. View lidar point clouds with Point Cloud Library (PCL). Lesson: Point Cloud Segmentation. Program the RANSAC algorithm to segment and remove the ground plane from a lidar point cloud. Lesson: Clustering. Draw bounding boxes around objects (e.g. vehicles and pedestrians) by grouping points with Euclidean clustering and k-d trees. Lesson: Real Point Cloud Data. Apply segmentation and clustering to data streaming from a lidar sensor on a real self-driving car. Lesson: Lidar Obstacle Detection Project. Filter, segment, and cluster real lidar point cloud data to detect vehicles and other objects!
Course 2: Radar Instructor:Abdullah Zaidi, Metawave Lesson: Radar Principles. Measure an object’s range using the physical properties of radar. Lesson: Range-Doppler Estimation. Perform a fast Fourier transform (FFT) on a frequency modulation continuous wave (FMCW) radar signal to create a Doppler map for object detection and velocity measurement. Lesson: Clutter, CFAR, AoA. Filter noisy radar data in order to reduce both false positives and false negatives. Lesson: Clustering and Tracking. Track a vehicle with the Automated Driving System Toolbox in MATLAB. Lesson: Radar Target Generation and Detection Project. Design a radar system using FMCW, signal processing, FFT, and CFAR!
Course 3: Camera Instructor:Andreas Haja, HAJA Consulting Lesson: Computer Vision. Learn how cameras capture light to form images. Lesson: Collision Detection. Design a system to measure the time to collision (TTC) with both lidar and camera sensors. Lesson: Tracking Image Features. Identify key points in an image and track those points across successive images, using BRISK and SIFT, in order to measure velocity. Project: 2D Feature Tracking. Compare key point detectors to track objects across images! Lesson: Combining Camera and Lidar. Project lidar points backward onto a camera image in order to fuse sensor modalities. Perform neural network inference on the fused data in order to track a vehicle. Lesson: Track An Object in 3D. Combine point cloud data, computer vision, and deep learning to track a moving vehicle and estimate time to collision!
Course 4: Kalman Filters Instructors: Dominic Nuss, Michael Maile, and Andrei Vatavu, Mercedes-Benz Lesson: Sensors. Differentiate sensor modalities based on their strengths and weaknesses. Lesson: Kalman Filters. Combine multiple sensor measurements using Kalman filters — a probabilistic tool for data fusion. Lesson: Extended Kalman Filters. Build a Kalman filter pipeline that smoothes non-linear sensor measurements. Lesson: Unscented Kalman Filters. Linearize data around multiple sigma points in order to fuse highly non-linear data. Project: Tracking with an Unscented Kalman Filter. Track an object using both radar and lidar data, fused with an unscented Kalman filter!
Partners
One of the highlights of working at Udacity is partnering with world experts to teach complex skills to anybody in the world.
In this program we are fortunate to work especially closely with autonomous vehicle engineers from Mercedes-Benz. They appear throughout the Nanodegree Program, often as the primary instructors, and sometimes simply offering their expertise and context on any other topic.
MathWorks has also proven terrific partners by offering our students free educational licenses for MATLAB. The radar course in this program is taught primarily in MATLAB and leverages several of their newest and most advanced toolboxes.
That sums up how I felt building this Nanodegree Program. We spent over a year kicking around ideas for this program, starting work and stopping work, and there were times I thought it wasn’t going to happen. Then we got the right group of instructors together it came together faster than I ever imagined, and it’s beautiful.
My Udacity colleague Vienna Harvey sat down with Australian podcaster Zoe Eather to discuss the role of both ethics and education as they relate to self-driving cars. It’s a fun episode 🙂
This interview is part of Zoe’s Smart Community podcast, which covers everything from infrastructure, to data, to climate change, to mobility.
Prior to Vienna’s interview, I got to take Zoe for a spin in Carla, Udacity’s self-driving car. Zoe was delightful and I think you’ll enjoy listening to her and Vienna geek out about self-driving cars.
Recently I sat down with Bjarne Stroustrup, the creator of C++, to discuss his career and the evolution of C++ over years.
We discussed Bjarne’s origins in Denmark, his PhD work at Cambridge, the origins of C++ at Bell Labs, how to teach C++, the ISO committee that governs C++, and what exactly made Bjarne’s career so successful. There’s a lot more, too 😀