
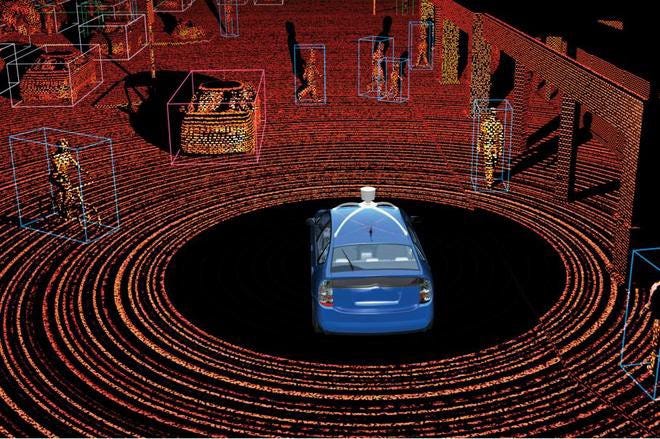
Localization is how a car finds where it is in the world.
It’s tempting to think that localization is an easy problem, since GPS-enabled smartphones are ubiquitous, but localization is actually really hard.
That’s because GPS is only accurate to within about 1 meter. If you think about how big a meter is (about three feet), if a car if off by a meter, it could be driving on the sidewalk, hitting things.
Self-driving cars need single-digit-level localization accuracy. To that end, we used sensor measurements and maps and sophisticated mathematical algorithms to localize the vehicle.
Here are some localization projects that Udacity Self-Driving Car students have published!
Tracking a self-driving car with high precision
Privya has a terrific description of her localization project, along with a video. Plus, she asks lots of great questions about how to localize in complicated scenarios, which is what we have to deal with in the real world.
“Here is an interesting question? — How would we use this technique for a real self driving car traveling between City A and City B? Particle filters assumes we have a map of the world with known location of many landmarks. How can we determine location of hundreds of landmarks and feed those to the car?”
Self-Driving Car Engineer Diary — 9
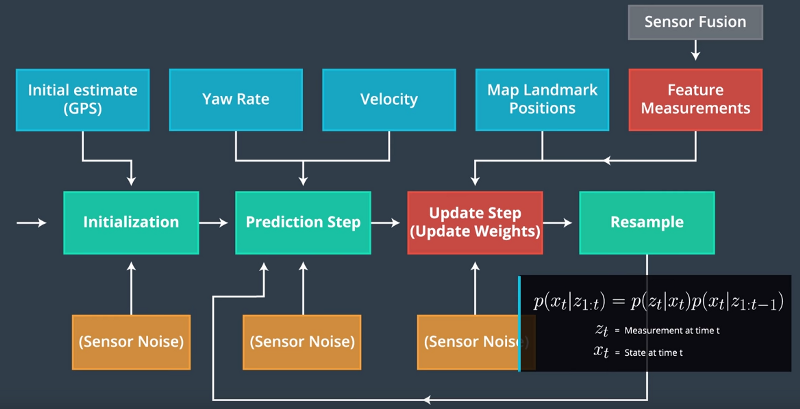
If you’re looking for a step-by-step walkthrough of the particle filter algorithm, Andrew combines a review of material from the Udacity localization lesson with his own observations.
“Update Weights : These measurements form the weight of each particle by applying the multi-variate gaussian probability density function. This function tells us how likely a set of landmark measurements is given, our predicted state of our car.”
