
Two big exclusive scoops and a smaller headline in the autonomous vehicle world today.
Apple Scales Back Its Ambitions for a Self-Driving Car

The New York Times got five sources at the notoriously secretive Apple self-driving car effort (Project Titan) to open up about the successes and failures of the project. It sounds like Apple has gone through similar debates as most other self-driving car efforts (build Level 3 features or jump straight to Level 4? have a steering wheel or not? focus on retrofitting existing vehicles or build a new vehicle from the ground up?).
Things seemed to go sideways for a while, but apparently the project is back on a growth trajectory. It will be exciting to see what Apple eventually launches.
“The car project ran into trouble, said the five people familiar with it, dogged by its size and by the lack of a clearly defined vision of what Apple wanted in a vehicle. Team members complained of shifting priorities and arbitrary or unrealistic deadlines.”
Uber’s self-driving cars hit Toronto streets — in manual mode

Uber has self-driving cars on the streets of Toronto now, although they’re being driven by humans in “mapping mode” for the moment. If Uber does pull the trigger on self-driving mode — which it expects to do later this year — that will give it test vehicles in Pittsburgh, Phoenix, San Francisco, and Toronto, which might be a wider geographic spread than even Waymo.
“The cars aren’t available for rides: they will be conducting mapping tasks. Uber says it hopes to test the cars in autonomous mode by the end of 2017.”
Inside Waymo’s Secret World for Training Self-Driving Cars
The Atlantic scored a big scoop that might justly be titled, “Inside Waymo’s Secret Worlds” [plural].
The first world is Waymo’s physical testing facility at the old Castle Air Force Base, in California’s central valley. The article talks about a city with streets but no buildings, designed specifically for testing self-driving cars. When Waymo runs into a particularly sticky driving situation, they just pave a version of the streets on their test facility and run their cars through that scenario over and over and over again.
“We pull up to a large, two-lane roundabout. In the center, there is a circle of white fencing. “This roundabout was specifically installed after we experienced a multilane roundabout in Austin, Texas,” Villegas says. “We initially had a single-lane roundabout and were like, ‘Oh, we’ve got it. We’ve got it covered.’ And then we encountered a multi-lane and were like, ‘Horse of a different color! Thanks, Texas.’ So, we installed this bad boy.””
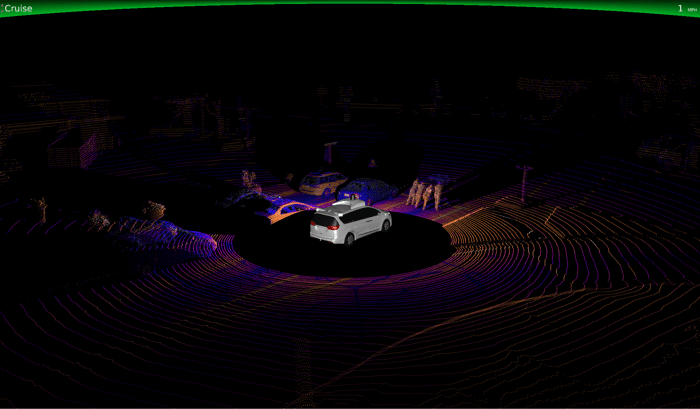
The second world is Waymo’s internal simulation engine, named Carcraft. What started as a playback tool for sensor data has morphed into a simulation engine that allows Waymo to “drive” billions of miles per year.
“Once they have the basic structure of a scenario, they can test all the important variations it contains. So, imagine, for a four-way stop, you might want to test the arrival times of the various cars and pedestrians and bicyclists, how long they stop for, how fast they are moving, and whatever else. They simply put in reasonable ranges for those values and then the software creates and runs all the combinations of those scenarios.”
