This week I had the pleasure of interviewingAutoX COO Jewel Li for Forbes.com. We discussed what it’s like to run a company spread across the US and China. Diversity brings challenges:
“Culture is hard to explain,” says Li, who immigrated from China to the United States in 2011 to pursue her PhD at the University of Delaware. “It’s in every single detail. Are you writing all of your documents and messages in English, so that everyone can understand? If the company caters for employees, is it a diverse selection of food?”
But there are unexpected advantages:
“A lot of AV companies haven’t been testing and are data hungry. We were very lucky that there were always fleets to test in China. It never slowed us down,” says Li.
GM CEO Mary Barra also recently stated that there will still be gas cars on the road in 2040, but that’s just stating the obvious. Cars last for 15 years, on average. So unless you believe that gas cars will no longer be for sale in 2025, then they’ll still be on the road 15 years later.
But these still seem like exciting steps forward for electric cars.
The second quarter of 2020 has been pretty great for Phantom.ai. The Silicon Valley-based ADAS startup closed a $22 million Series A financing in April, led in part by Ford Motor Company. Today, they announced a partnership with Renesas, a Japanese Tier 1 automotive supplier, to develop “full stack Level 2 advanced driver assistance systems.”
This makes Phantom.ai one of the very few startups targeting what would seem to be a lucrative and promising market.
An oddity of the self-driving car revolution is that startups have so far had much more success tackling Level 4 full autonomy, compared to Level 2 advanced driver assistance.
Level 2 means that a driver still needs to be in control of the vehicle, which leaves startups with one of two difficult paths:
Become a manufacturer and build vehicles for consumers.
Faced with that challenge, and perhaps also for safety concerns, most startups have opted to instead work on Level 4 autonomy. This is a much harder challenge, but carries the potential of deploying robotaxis directly and probably (maybe?) avoiding the existing automotive supply chain.
The only company that has cracked this nut, Mobileye, cracked it in a huge way, exiting to Intel in 2017 for $15 billion. On the one hand, I would have thought more entrants would’ve been attracted to this space. On the other hand, it took Mobileye 18 years to achieve this success, highlighting how long the automotive supplier road can be.
That leaves Phantom.ai, which has survived on a mere $5 million seed funding round since 2016, and overcame a cringe-inducing 2018 rear-end collision with a press crew on-board. Kudos to them as the leading startup in the space.
Even Phantom’s own employees seem a little dumbstruck by this state of affairs. One anonymous employee wrote in a 2019 Glassdoor review:
“ If they exist, we don’t know who our competitors are, other than MobilEye. Is another company going to come in and steal our thunder? It’s my biggest worry. [Our competitors, by the way, are not Waymo, Aurora, Cruise, etc… their product is for a different market.]”
The main competitor I can think of is Comma.ai. I own their EON DevKit and have installed it in several different vehicles. The performance of the OpenPilot software it runs is impressive. I wish it would get to market in a bigger way than it has so far.
But cracking the automotive supply chain is tough.
Tencent, the Chinese technology giant behind WeChat, has announced plans for a “Net City” on a two square kilometer portion of their campus in Shenzen.
The Tencent announcement notes that, “A “green corridor” for buses, bicycles and autonomous vehicles will be the backbone of the district, running down its length.” They’ve hired a US architecture firm to design it all.
The zone will “accommodate” 80,000 people, although it’s not clear if those are residents or Tencent employees who will actually live off-site.
The report is pretty light on details, and even notes that there have been a few other announcements like this in Japan and North America, from Google no less. Google’s Sidewalk Labs just announced they will not proceed with their “smart city” in a Toronto neighborhood. The culprit was an inability to overcome a combination of urban regulatory burden, NIMBYism, and data privacy concerns.
To me, the North American contrast is the most interesting aspect to the Tencent project. This could either be read as a Chinese tech giant simply running a few years behind an American tech giant, only to give up in a few years itself. Or it could prove the point that China is capable of major infrastructure projects that just aren’t possible in North America anymore.
Every month Robotics Business Review compiles a list of private financing deals for robotics companies.
In April, as the world shut down for COVID-19, funding basically dried up.
“Robotics Business Reviewtracked about 26 transactions worth a total of more than $600 million last month, compared with 29 deals worth $2.7 billion in March 2020 and 30 transactions worth $6.5 billion in April 2019.”
Many of the April transactions that did occur were in China.
May, however, showed a meaningful uptick. May 2020 numbers were comparable to where they were a year ago, and at least in the same order of magnitude as the March 2020 figures.
The May figures were led by huge funding rounds for Waymo and Didi. The rest of the May transactions totaled only $250 million.
For comparison, the May 2019 figures were even more concentrated, with the bulk of the month’s investments driven by a huge fundraising round for Cruise Automation.
I’m not quite ready to declare a return to normalcy yet, but it’s a big step in the right direction.
Elon Musk famously tweeted that Tesla vehicles will be appreciating assets, a first for automobiles, if that comes to pass. The logic stems from another controversial Musk claim, that Teslas will eventually become robotaxis, generating passive income for their owners.
Recently, Electrek and other outlets wrote Tesla has taken a baby step toward the robotaxi vision. Nothing self-driving, much more pedestrian (excuse the pun) than that.
Tesla has created an “Add Drive” feature in its app.
Tesla does not yet appear to be advertising this feature, and I don’t own a Tesla, so I can’t confirm for myself. But apparently Tesla owners can now give access to their car to anybody, just by adding an email address. No key necessary, just the Tesla app and a confirmed email address.
Even if the robotaxis are a long time coming, you could imagine this might make it a lot easier for Tesla owners to rent their vehicles to other drivers through sites like Turo.
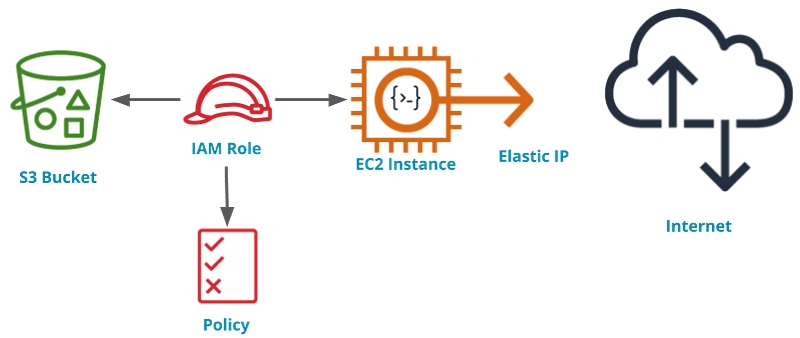
Today Udacity launched a free, four-week Intro to Cloud Computing course that I have been working on for the last few months with Ami Malhoof. It’s a great course and if you are new to cloud computing, you should take it!
Ami had a really ambitious vision for this course, and I think it turned out really well. Over the course of five lessons, students:
Learn the basics of cloud computing
Boot a virtual machine locally
Create Identity and Access Management (IAM) roles and policies
Upload files to Amazon Web Services (AWS) Simple Storage Service (S3)
Launch an AWS Elastic Cloud Compute virtual server instance
Construct an AWS Lambda serverless function
Configure AWS API Gateway, Lambda, and S3 together to host a website
That’s a lot to accomplish in just a few weeks! And it’s free!
Mobileye, which now belongs to Intel, recently published a video of a 40-minute autonomous drive through urban Jerusalem. Mobileye is based in Jerusalem, and its streets may be among the most challenging that self-driving cars currently handle.
The recording clocks in at about 26 minutes, shorter than the actual drive, because parts of the drive are played back at 2x speed. I annotated the video with my thoughts.
[1:05] Mobileye’s sensing display is pretty sparse, but does a nice job focusing on the important items.
[1:05] I am a little surprised that Mobileye’s in-cabin display set-up is clearly aftermarket. I guess that shouldn’t surprise me, but it’s a reminder that Mobileye is a supplier, not an OEM.
[1:50] Merges from a standing start are tough. Nice work.
[3:10] Overtaking the parked truck is very safe and delibrate, but I could imagine eventually that will need to happen faster.
[4:25] The pedestrian is detected well before the crosswalk. Awesome.
[5:15] “We use environmental cues to determine that these cars are parked, and not just stuck in traffic.” I wonder what those cues are? The map?
[6:20] This drive is camera-only, but Mobileye says they are building an entirely separate, redundant sensing stack that is radar plus lidar. They want to achieve full self-driving with each subsystem independently. They call this “true redundancy.” Interesting choice to build two separate stacks, divided by modality, as opposed to equip the vehicle with two independent sensor suites with all modalities.
[8:15] Mobileye’s Road Experience Management technology pulls anonymized sensor data from BMW, VW, Nissan, and SAIC vehicles. Mobileye fuses this data into is mapping system, to keep its maps up to date around the world. This is part of the dream of ADAS — that you can get much more data from a production fleet of human drivers than a fleet of test vehicles. “We are basically leveraging Mobileye’s strong ADAS position to build and maintain a near-real-time HD map.” I wonder exactly what data they are pulling, and whether the manufacturers will agree to this in the long-run.
[10:17] This route includes some very narrow Jerusalem streets. This one, at least, is totally straight. I’m not sure this “proves” AVs can operate in places like India, but this is certainly a more challenging environment than, say, Phoenix.
[11:10] The unprotected left turn felt a little tense, but basically okay.
[12:20] Nice job detecting a pedestrian dragging a forklift. This scenario is reminiscent of the situation that led to Uber ATG’s fatal collision with Elaine Herzberg in Arizona. Mobileye seems to have no problem with this here.
[13:15] Really interesting and successful “negotiation” to merge around a stopped vehicle.
[15:00] The human driver takes over to pull over in a bus stop zone, so that the drone operator (riding shotgun) can land the drone and change the battery. I am surprised the human driver had to take over here. Compared to a lot of autonomous maneuvers in this video, “pull over,” seems pretty basic (and necessary).
[15:00] This stop highlights that the human driver does not seem to provide any input to the AV during the whole drive. The route appears pre-programmed from start to finish. I wonder how strong Mobileye’s in-vehicle UX is.
[15:30] This shot reminds me how impressive drone operators are. You take it for granted, but this drone operator is sitting in the passenger seat of a moving vehicle. He’s keeping a drone, which he can’t see, in place directly above the car, at hundreds of feet off the ground, for forty minutes!
[17:15] Roundabouts are tough for Americans. I’d pay a self-driving car to handle roundabouts for me.
[17:55] Even self-driving cars want to change to the next lane if it looks faster!
[19:05] Super-narrow street with lots of cars. I’d be nervous driving here. Impressive, especially for a camera-only system! Localization typically relies on lidar. Mobileye can clearly localize effectively with just cameras.
[19:35] A driver exits a parked car to wave the AV around. The AV doesn’t seem to “understand” the wave, but once the driver gets out of the way, it figures out to pass the parked car.
[21:27] That was a challenging unprotected left turn. I’m impressed again.
[22:45] Interesting that the AV does not yield to the moped (I think it’s a moped) in the crosswalk. The system seems to recognize the vehicle as a moped, but the moped is trying to use the crosswalk like a pedestrian. Tricky situation.
[24:20] The sensing UI seems to recognize a leading car quite far ahead — so far ahead that it doesn’t appear in the drone shot. I wonder what the system’s range is.
[25:25] Once again, the safety driver takes control to pull over and end the ride. I’m puzzled why that wasn’t pre-programmed, like the rest of the ride.
Overall, this was a lot of fun to watch and a really impressive performance by Mobileye. Jerusalem seems like a tough place to drive!
“Interestingly, the drop in sales only resulted in a temporary inventory backlog. While Manheim estimates that retail used car inventory in April was 161% higher than usual, May used car inventory has dropped 25% below average. The supply reduction may be due to fewer buyers trading in older vehicles, as new vehicle sales followed a similar trajectory from April to May.”
It’s been a tough 18 months for self-driving cars. The enthusiasm (and cash) that poured into the industry from 2016 to 2018 has dampened as everyone realizes Level 4 driverless robotaxis are not immediately around the corner.
But companies are still making progress and hiring.
VentureBeat reports that Aurora now boasts 500 employees (including interns!). CEO Chris Urmson says, “With the industry shakeup right now, there’s a lot of new talent on the market, an opportunity we intend to take full advantage of.”
Cruise has laid off employees recently, as well, all though supposedly this was in the interest of focusing on engineering, which would align with the Zoox hires.
Reuters reports that Cruise founder and CTO Kyle Vogt sent quite an email to Zoox engineers:
“Cruise is willing to recognize the full value of the rewards you’ve earned at Zoox — something that is very unlikely to occur via an acquisition in this environment.”