I confess I was previously unfamiliar with the term “middle mile”, which apparently refers to the fixed routes between centralized distribution centers and dispersed retail locations.
The advantage, I take it, is that “middle mile” routes are limited and fixed, which would dramatically simplify technical challenge.
The box trucks should also be simpler to handle than articulated tractor-trailers.
The middle “swivel” point between a tractor and trailer adds a huge degree of complexity for control systems — not only laterally, but also vertically. The back of the trailer literally bounces up and down.
Box trucks are essentially rigid bodies in that way, like cars.
One of the big questions in autonomy is how and how much it is possible to simplify the technical challenge of autonomy. Tesla approaches this by limiting self-driving mainly to highways. Waymo limits its vehicles to specific geofences in a few metro areas. Voyage tackles this deploying relatively low-speed vehicles in gated retirement communities. Other vehicles work on sidewalks, or farms, or warehouses, or mines.
Gatik is betting that “middle mile” logistics will be a favorable niche.
I’d love to see some way to quantify how simple an environment is.
Rivian, which operated in stealth mode for nearly a decade, continues to quietly fly under the radar as one of the most intriguing startups in mobility.
The average American has never heard of them, and probably will never hear of them until they launch their first electric vehicles next year.
They’ve raised a ton of money since their founding in 2009, and they’ve made some recent news as a possible pawn in a (possibly non-existent?) competition between Jeff Bezos and Elon Musk.
If you want to learn a bit more about Rivian and listen to highly-energetic take on why first Ford and now Amazon should buy Rivian, check out this video from HyperChange last year.
“That was a clear moment in time where the whole industry went from being a bull market to a bear market,” Mr. Cameron said. “Covid has taken us even further into the bear market.”
The Times closes with the high capital needs of self-driving companies.
With autonomous vehicles, “you may find yourself in a company that requires billions of dollars of capital,” with no clear timeline for building a large business or seeing a return on the investment, said Aaron Jacobson, a partner at NEA.
This is true, and it is one reason robotics companies are not super attractive generally, at the moment. But it would be a mistake to get too spooked by the industry’s capital needs.
The other side of that coin, as Warren Buffett has preached for years, is that capital intensive businesses offer the opportunity to deploy huge amounts of capital with attractive returns. Capital requirements also form a durable moat around the business.
What this tells me is that direct to learner businesses are very attractive. They can serve a very large number of learners very efficiently, they can lightly monetize and yet produce massive revenues because of their scale, and they don’t require a huge amount of capital to build.”
Autonomous vehicles and online education are both attractive industries, but they are very different industries, with distinct capital needs. Companies in each industry have to tailor their business plans to that reality.
I remember less than four years ago meeting the whole Voyage team was at Udacity and had never worked on self-driving cars. Now they’re following the same path and building on the same platform as Waymo.
This team is truly an inspiration that if you work hard you won’t believe what you can accomplish.
And check out this video!
Got 2 minutes to kill? Nerd out with us by watching our self-driving car navigate:
Yesterday Tesla published a blog post, “Getting Back to Work,” that emphasized the company’s desire to resume automotive production at its Fremont, California, plant.
The post links to Tesla’s “Return to Work Playbook”, a polished 38-page report on Tesla’s plans for regulation and compliance.
The document is clearly intended for government relations and press purposes, not as a how-to manual for staffing the plant properly. Those documents exist, too, and this playbook shows some examples, but this playbook is for the public, not Tesla staff.
Nonetheless, the playbook serves as a good read for those of us wondering what the near-term future of work will look like, whether in manufacturing or retail or offices.
The main steps include:
The most notable changes to me are the use of PPE, temperature checks, and eliminating large meetings.
Cleaning
There’s quite a bit of emphasis on cleaning and disinfectant. Most of what I’ve read in the news about COVID indicates person-to-person transmissions, not so much person-to-surface-to-person. Cleaning is always welcome, of course, but I wonder how much of an effect rigorous cleaning will have.
Eating
“Break/lunch areas — occupancy reduced by removing some chairs and table, posting signage and installing barriers in some areas.”
Temperature Screening
The playbook references both thermal cameras and thermometers. It sounds like the thermal cameras are passive sensors that alert whenever somebody passes by with a temperature. That seems genius, and is also much more invasive than Americans are typically used to in the workplace.
Fun
“Ensure common areas are closed (e.g. game areas, gym, bean bags, etc.).”
Fun is about to become a lot less important at work.
Carpooling
“Verify signs promoting carpooling have been removed.”
Beyond Tesla, I wonder if state-regulated HOV lanes will also go away.
Handshakes
“Do not shake hands or engage in any unnecessary physical contact”
We’ve all already stopped shaking hands, but it’s interesting to see a company explicitly prohibit the practice. I assume this will come back eventually, but I wonder how long.
Testing
“By entering into our work location, you agree that: … YOU have NOT tested positive or have been tested and are awaiting the results for COVID-19 in the last 14 days [my emphasis]”
I wonder how rigorously this will be followed. This means if the tests ever become widespread enough that you could just take them on-demand, you might not want to take them, lest you get banished from work until you receive a result. Perhaps there is a legal liability issue that drives this.
Travel
“All international business-related travel is currently curtailed and requires VP’s approval…Please refrain from booking and staying at alternative or home sharing rentals.”
Further evidence that Airbnb has a tough road ahead.
Self-Care
“Hearing about the pandemic repeatedly can cause undue stress, so consider taking a break from it.”
Sound advice, I suppose, but let’s not cross the line into willful ignorance.
Conference Rooms
“Conference Rooms — occupancy is reduced to 1/3 capacity until further notice.”
That probably means that in order to have a 2-person meeting you’ll need a room originally designed for at least six people. That’s going to be hard to come by at most companies (I don’t know about Tesla specifically). I would guess this winds up being a major factor in causing white collar employees to continue to work from home. A meeting with a colleague sitting at the next desk might be easier to arrange via web chat from home, rather than scrounging a six-person conference room in the office and wearing masks.
The Detroit Free Press reports that new features are coming to GM Super Cruise. Specifically, Super Cruise will now perform lane changes “on demand”, and will negotiate highway interchanges.
More significantly, Super Cruise will roll out to the Cadillac Escalade and the Cadillac CT4 and CT5 sedans.
Super Cruise is often touted as the closest competitor to Tesla Autopilot, and maybe even a superior alternative.
Maddeningly, however, for years Super Cruise has only been available on top-of-the-line Cadillac CT6 models. As a result, it’s really hard to find a car that has it. I’ve never been in a car equipped with Super Cruise.
The Free Press also quotes GM that Super Cruise has been activated for 5.5 million miles since it launched in 2017. That means Waymo has driven more Level 4 miles since 2017 than Super Cruise has driven in something approximating Level 3. Tesla Autopilot, which has logged billions of miles, has orders of magnitude more data.
Nonetheless, Super Cruise has the potential to roll out to the larger GM model base and begin recording data at a level far beyond anything we’ve seen so far — from any manufacturer.
The company was founded by Stanford PhD and AI wunderkind Jesse Levinson, along with Tim Kentley-Klay, a brash Australian designer.
For years Zoox was highly secretive about its technology and goals, even by the standards of the tight-lipped self-driving car industry. The Zoox website was a single HTML page sporting only the company logo.
In 2018, Zoox pulled back the curtain with awesome highlighting the its autonomous capabilities and Mad Max design ethos.
Only a month later, Kentley-Klay was ousted just after Zoox raised $500 million in venture funding. Eventually Zoox recruited Intel Chief Strategy Aicha Evans as CEO.
All of which is to say, Zoox has been quite a story.
Apparently the company terminated contractors and laid off 10% of its workforce in light of the COVID pandemic. Now it seeks either further venture capital funding, or an acquirer.
The status of being publicly for-sale is reminiscent of Drive.AI, another prominent (although much smaller) self-driving start-up. That firm was widely reported to be shopping for a buyer during the first half of 2019. Apple ultimately acquired the startup in a firesale, days before bankruptcy.
All that said, a few qualifiers.
The stories I’ve read seem to make a lot of hay that Zoox has hired an investment bank, Qatalyst Partners. Investment banks usually do spell “sale”. But they can also spell “investment”. Particularly for a company of Zoox’s size, the sources of private investment change from traditional venture capital firms to larger institutional funds that work more regularly with investment banks. Zoox may simply be working on a really large funding round, which would go hand-in-hand with also beating the bushes for any potential acquirers.
Also, the stories I’ve read indicate Zoox plans to hire back laid off employees and contractors once coronavirus subsides. That’s easy to say now, of course, but it’s worth keeping in mind that perhaps what looks bad is merely a bump in the road.
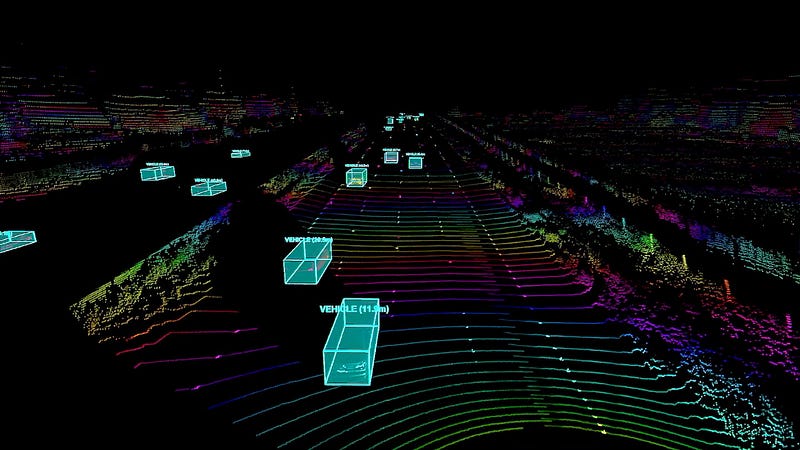
Ford’s dataset includes multiple driving environments, multiple sensor modalities, multiple vehicles, and multiple seasons, on a consistent 66 km route in the Detroit area.
“Soon, your Volvo will be able to drive autonomously on highways when the car determines it is safe to do so,” said Henrik Green, chief technology officer for Volvo Cars.
That sounds a lot like Level 3 autonomy. The timing of this announcement is particularly interesting, coming right on the heels of Audi retreating from Level 3 — due to liability concerns.
The Volvo ADAS systems I’ve tested out in the past have always been quite impressive — in the top tier of systems behind Tesla Autopilot. If there is one way for competitors to catch and surpass Tesla, it might be exploiting the lidar technology that Tesla has famously eschewed.
This is outside my usual wheelhouse of autonomous vehicles and robotics, but I played a significant (albeit behind-the-scenes) role teaching the first course in the three-course program.
Tom Verbiscer and I worked together to design and build a sequence of lessons on high-availability, resilience, and redundancy. Tom teaches about:
Availability Zones
Regions
Server-based architecture
Serverless architecture
Global services
DynamoDB and global tables
S3 classes and features
Uptime
Downtime
Service-Level Agreements
Recovery Time Objectives
Recovery Point Objectives
Disaster Recovery
Monitoring with CloudWatch
Alerting with Simple Notification Service
Recovery
Chaos Engineering!
And that’s just the first course of the program!
I hope everyone that enrolls learns as much from taking the program as I did working with Tom to build the program.