A great irony of the mobile phone revolution of the late 2000s and early 2010s is that so few great technology companies grew out of that disruption. The companies that dominate the mobile ecosystem — Apple, Google, Facebook, Amazon, Netflix — were all born long before smartphones hit the market.
The largest tech company that grew out of the mobile revolution is (I think) Uber. Which is ironic because smartphones at first glance seem to have so little to do with ridesharing.
I once got to listen to Warren Buffett talk in person, and he relayed how in the 1990s he and Bill Gates spent a lot of time trying to figure out the key opportunities provided by the Internet. But search engines never occurred to them.
Similarly, when I was in business school in the 2000s, I spent a lot of time trying to figure out what the disruptions the smartphone would bring. Transportation never occurred to me.
Now the question is what disruptions will self-driving cars bring? And the answer might be something that isn’t occurring to anybody.
Less than two years ago, a team from Microsoft Research Asia made a huge splash by introducing ResNet, a deep neural network that used residual learning and “skip” connections blew away the competition in image classification.
Sure enough, one of the co-authors of that paper, Shaoqing Ren, has departed MSRA to start a self-driving car company with some of his MSRA colleagues. Ren is also the author of the Faster-RCNN paper, making him something of a star in the world of deep learning.
This is news now because Momenta, the startup founded by Ren and his colleagues, just raised $46 million dollars in funding from NIO and Daimler and Sequoia China.
I know almost nothing about Momenta, but I’m taken by one section of their homepage, which describes their approach to data-driven path planning:
Our data-driven approach is to build a driver with billions of miles of driving experience. Crowdsourcing allows us to obtain billions of driving trajectories localized in semantic HD maps. By mapping from environment perception data to driving trajectories in semantic HD maps, we conduct autonomous driving planning. This provides us a unique and elegant framework to solve corner cases by adding corresponding data rather than adding rules.
I’m excited to see how the Momenta founders apply deep learning to path planning.
Union road transport and highways minister Nitin Gadkari said on Tuesday, “We won’t allow driverless cars in India. I am very clear on this. We won’t allow any technology that takes away jobs. In a country where you have unemployment, you can’t have a technology that ends up taking people’s jobs.”
This attitude crops up in other industries in the US, although often “safety” is the given reason, even when “jobs” is widely understood to be the real reason.
At least the Indian government is being honest about why they’re banning self-driving cars.
Nonetheless, it seems hard for me to believe this ban will last. More than any other country I can think of, India has seen its economy transformed because of information technology. It’s hard to believe the country will sit out the next wave of the computational future.
“There was a similar debate when computers came in. Not all technology leads to joblessness. You have to have the right balance. Technology has to coexist,” said Abdul Majeed, automotive leader, Price Waterhouse & Co.
Hiring partners tell us all the time that they want candidates who are excited about the field of autonomous vehicles. That’s part of what makes the Udacity Self-Driving Car Engineer Nanodegree Program so impressive — students from around the world have sought out the program in order to learn about the field.
In addition to the twelve different projects students must pass to earn the Nanodegree credential, many of our students go even further and build independent projects of their own.
Here are a few projects that different students have undertaken. Maybe they can inspire you to build your own independent project!
Michael is a student in both the Udacity Self-Driving Car Nanodegree Program and also the Udacity Machine Learning Nanodegree Program. For his MLND capstone project, he built a neural network to detect lanes on the road.
This blog post is a two-part series. Part 1 is all about collecting and labeling data, which is a major task in any machine learning project. In case the suspense is killing you, here’s Part 2, in which Michael uses convolutional layer visualization, transfer learning, and finally a segmentation network, to build a lane-finding model.
For anybody who is interested in building their own mini self-driving car, Yazeed has put together a five-part series on how he built his. Part 1: Equipment & Plan. Part 2: Hardware Setup. Part 3: Manual Control Using Raspberry Pi & Python. Part 4: Everything In Place. Part 5: Serverless Control Using Computer Vision 🙂
Kyle wrote up a deep and detailed blog post about modifying deep neural networks to incorporate uncertainty. Uncertainty is a core component of Bayesian logic, and we use uncertainty is algorithms like Kalman filters, which are crucial for fusing data from multiple sensors. Kyle follows guidance from the machine learning group at Cambridge University to compare differences in softmax activation functions and ultimately develop a confidence measure for classification values.
Bogdan constructed his own mini self-driving car using the Donkey hardware, but then built his own software stack. He got ROS running on a Raspberry Pi (!!) and trained a behavioral cloning neural network.
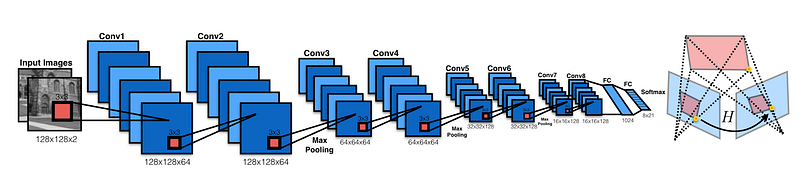
Mez implemented a paper from the team at Magic Leap for implementing homography with deep learning. Homography is the mapping of two different perspectives onto each other. So if you take a photo of a statue from the north side, and one from the south side, can you tell that it’s the same statue and can you figure out how to generate an image from the east or west side? Magic Leap is a virtual reality company, and you can see why this would be an important skill in virtual worlds.
I’m excited to be on a panel discussing Teaching Machines to Drive Like Humans. I suppose at this point my expertise is more on Teaching Humans to Teach Machines to Drive Like Humans, but I’ll try to add value anyway.
The me Convention runs from September 15th to 17th, and the International Motor Show runs ten days, from September 14th to 24th.
This will be my first visit to Germany and I’m looking forward to meeting people!
If you’re a current or perspective student in the Udacity Self-Driving Car Nanodegree Program and you’ll be in the area, let me know in the comments or by email (david.silver@udacity.com). We’re planning to organize an event or multiple events for Udacity students while I’m in Europe.
And if you’ll be there and you’d like to hire Udacity students, send me an email (david.silver@udacity.com) and I’d love to meet you, too!
A few weeks ago, I wrote about Lyft’s strategy of using their ride-sharing network as a platform for other companies’ autonomous vehicles, and the contrast this strategy drew with Uber, which is developing its own AVs. It seemed like Lyft’s strategy was playing out nicely.
Part of what makes Udacity special is how seriously we take student feedback, and I think how transparent we are about it. For the Self-Driving Car Nanodegree Program, we solicit student ratings at the end of every lesson, we talk with students in our Slack community, and we have a Waffle on which students report issues for us to address.
Students are our partners in building the world’s best autonomous vehicle educational program, and we’re always eager to learn what they think.
With that in mind, here are four reviews of the Udacity Self-Driving Car Engineer Nanodegree Program.
Vishal collects all of his Term 1 projects and reviews the key topics for each, as well as some of his results from the program so far. Great music underscoring his YouTube videos!
Milestones achieved so far:
Successfully completed Term 1
Got two interview calls for SDC job profile based on the skills learnt in the program
Started a small Artificial Intelligence Community in my current organization to share knowledge and make developers aware of these cutting-edge technologies.
Mithi walks through each module of Term 2 and describes the good (the material is rigorous and exciting!), the bad (C++ is hard), and the ugly (there are still some issues we need to fix). This type of enthusiastic and constructive critique is super-valuable to us in improving the Nanodegree Program.
Some people think that the first term had more material covered than this term and that you don’t need as many hours per week. I personally think I spent significantly more hours in this term than last term. Maybe it’s because I’m not as experienced in C++ and I didn’t do the `bonus challenges` of last term.
Darien provides an interesting perspective as a student who has been working with signal processing for many years. He is really impressed at the image processing power provided by newer tools like Keras, TensorFlow, and OpenCV. It’s a lot of fun for us to read about students who enjoy the material this much.
This course was a lot of fun. Multiple new techniques explained and understood… to some extend at least for me. This is just the tip of the iceberg on this field. It was a great experience, and I am looking forward to next term starting next week. It was a lot of work(more than the 10 hours per week forecasted by Udacity) but it worth every cent.
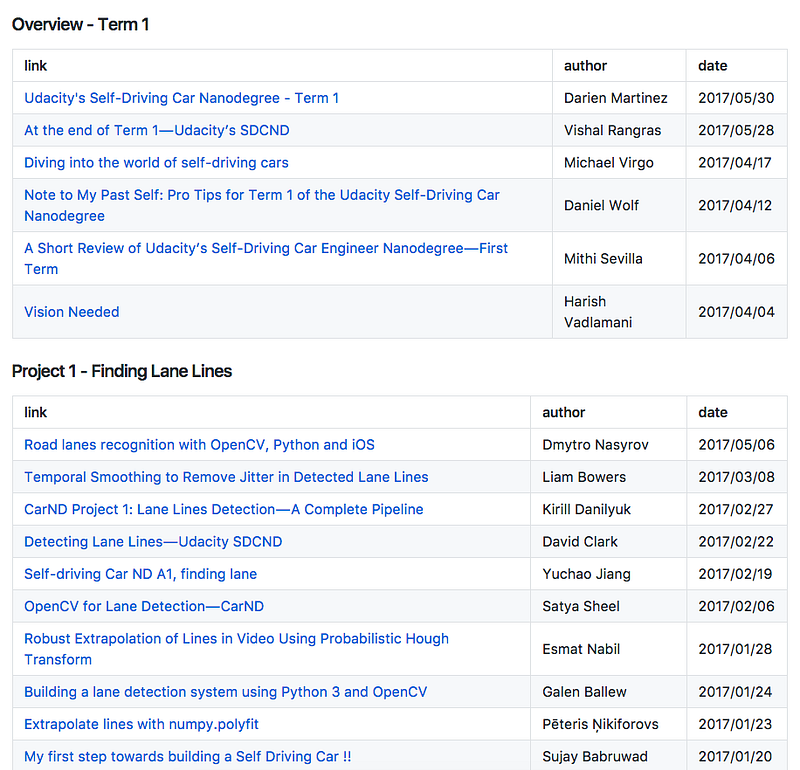
This isn’t precisely a “review” of the Self-Driving Car program, but Frank has put together a comprehensive list of student blog posts about each project in the Nanodegree Program. If you’re interested in reading about how different students approached a project, check it out!
Audi has announced Level 3 autonomous driving functionality in the upcoming 2018 A8 model. This would make Audi the first car manufacturer ever to release a Level 3 vehicle.
As a brief recap, the Society of Automotive Engineers publishes five autonomy levels.
Level 1 — Driver Assistance: The driving mode-specific execution by a driver assistance system of either steering or acceleration/deceleration using information about the driving environment and with the expectation that the human driver performs all remaining aspects of the dynamic driving task
Level 2 — Partial Automation: The driving mode-specific execution by one or more driver assistance systems of both steering and acceleration/deceleration using information about the driving environment and with the expectation that the human driver performs all remaining aspects of the dynamic driving task
Level 3 — Conditional Automation: The driving mode-specific performance by an Automated Driving System of all aspects of the dynamic driving task with the expectation that the human driver will respond appropriately to a request to intervene
Level 4 — High Automation: The driving mode-specific performance by an Automated Driving System of all aspects of the dynamic driving task, even if a human driver does not respond appropriately to a request to intervene
Level 5 — Full Automation: The full-time performance by an Automated Driving System of all aspects of the dynamic driving task under all roadway and environmental conditions that can be managed by a human driver
The controversial phrase in the Level 3 definition is:
“with the expectation that the human driver will respond appropriately to a request to intervene”
Some companies — most notably Google and Ford — contend that it’s not realistic to tell human drivers that they can divert their attention and then expect them to intervene quickly enough to avert an accident.
Audi seems more confident about human drivers, although they are rolling their system out slowly, presumably in an effort to better test and verify the car and the drivers.
Full Level 3 autonomous driving will be limited to divided highway scenarios at under 60 kmh (~35 mph). Basically, traffic jam driving. Which is the worst type of driving, so I look forward to the day when the computer takes that over in my own car.
The 2018 Audi A8 isn’t actually on the market yet, although it should be soon, and it’s price will start at 90,600 euro (~US$103,000). Definitely a luxury vehicle, and an exciting one.