

The Udacity Self-Driving Car Engineer Nanodegree Program teaches both standard computer vision techniques, and deep learning with convolutional neural networks.
Both of these approaches can be for working with images, and it’s important to understand standard computer vision techniques, particularly around camera physics. This knowledge improves the performance of almost all image manipulation tools.
Here are some of the skills that Udacity students mastered while using standard computer vision techniques to handle highway perception tasks. Check out how similar these images and videos look to what you might see on cutting edge autonomous driving systems!
Advanced Lane Finding
This is a terrific summary of the mathematics underpinning lane-finding. Milutin covers vanishing points, camera calibration and undistortion, and temporal filtering. If you’re interested in diving into the details of how a camera can find lane lines, this is a great start.
Here’s an example:
“Before we move further on, lets just reflect on what the camera matrix is. The camera matrix encompasses the pinhole camera model in it. It gives the relationship between the coordinates of the points relative to the camera in 3D space and position of that point on the image in pixels. If X, Y and Z are coordinates of the point in 3D space, its position on image (u and v) in pixels is calculated using:
where M is camera matrix and s is scalar different from zero.”
Feature extraction for Vehicle Detection using HOG+
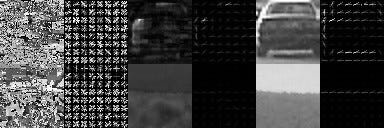
Feature extraction is the key step in building a vehicle detection pipeline. There are a variety of tools that can extract vehicle features that we can use to differentiate vehicles from non-vehicles, including neural networks and gradient thresholds. This post provides a practical guide to using a histogram of oriented gradients (HOG) to extract features. In particular, the examination of different color spaces is of interest:
“Here, we see a decent difference in S and V channel, but not much in the H channel. So maybe in terms of color histogram, RGB and the S & V channel of HSV are looking good.”
Advanced Lane detection
This is a step-by-step guide to how to identify lane lines using standard computer vision techniques on a variety of highway driving videos.
“1: Camera Calibration and Image Undistortion.
2: Image filtering.
3: Perspective transform
4: Lane detection
5: Displaying the detected lane.”
