
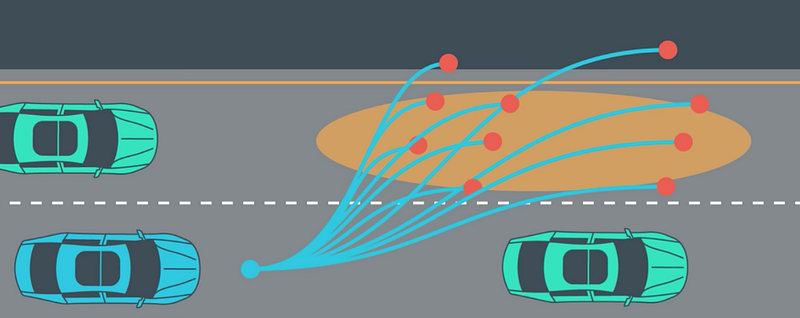
Term 3 of the Udacity Self-Driving Car Engineer Nanodegree Program starts with path planning. This is one of the deepest and hardest problems for a self-driving car.
Here are three Udacity student approaches that show the complexity and beauty of path planning.
Reflections on Designing a Virtual Highway Path Planner (Part 1/3)
Mithi published a three-part series about what she calls “the most difficult project yet” of the Nanodegree Program. In Part 1, she outlines the goals and constraints of the project, and decides on how to approach the solution. Part 2 covers the architecture of the solution, including the classes Mithi developed and the math for trajectory generation. Part 3 covers implementation, behavior planning, cost functions, and some extra considerations that could be added to improve the planner. This is a great series to review if you’re just starting the project.
“I decided that I should start with a simple model with many simple assumptions and work from there. If the assumption does not work then I will then make my model more complex. I should keep it simple (stupid!).
A programmer should not add functionality until deemed necessary. Always implement things when you actually need them, never when you just foresee that you need them. A famous programmer said that somewhere.
My design principle is, make everything simple if you can get away with it.”
Path Planning in Highways for an Autonomous Vehicle
Mohan takes a different approach to path planning, in which he combines a cost function with a feasibility checklist. He builds a cost function and then ranks each lane by how it does on a cost function. Then he decides whether to move to a lane based on the feasibility checklist.
“This comes down to two things (and I’m going to be specific to highway scenario).
Estimating a score for each lane, to determine the best lane for us to be in (efficiency)
Evaluating the feasibility of moving to that lane in the immediate future (safety & comfort)”
Self-Driving Car Engineer Diary — 11
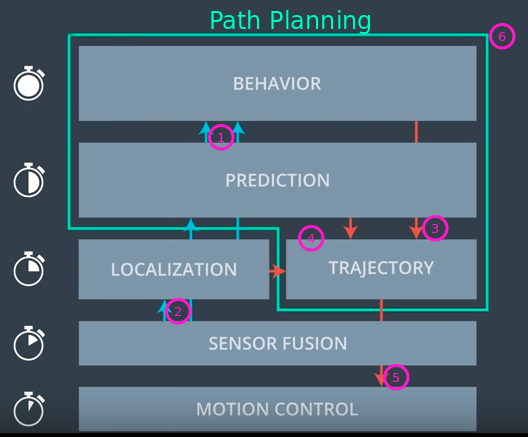
The 11th post in Andrew’s series on the Nanodegree Program covers Term 3 broadly and path planning specifically. In particular, Andrew lays out where this path planning project falls in the taxonomy of autonomous driving, and the high-level inputs and outputs of a path planner. This is a great post to review if you’re interested in what a path planner does.
“I found the path planning project challenging, in large part due to fact that we are implementing SAE Level 4 functionality in C++ and the complexity that comes with the interactions required between the various modules.”
These examples make clear the vision, skill, and tenacity our students are applying to even the most difficult challenges, and it’s a real pleasure to share their incredible work. It won’t be long before these talented individuals graduate the program, and begin making significant, real-world contributions to the future of self-driving cars. I know I speak for everyone at Udacity when I say that I’m very excited for the future they’re going to help build!
