
Many students describe the Path Planning Project as the most challenging project in the entire Udacity Self-Driving Car Engineer Nanodegree program. This is understandable. Path planning is hard! But it’s not too hard, and I’m going to tell you a bit about the project—and about path planning in general—in this post.
There are three core components to path planning: 1) Predicting what other vehicles on the road will do next, 2) Deciding on a maneuver to execute, in response to our own goals, and to our predictions about other vehicles, and 3) Building a trajectory to execute the maneuver we decide on.
This is a project that provides students a lot of freedom in how to implement their solution. Here are five approaches from our amazing students!
Reflections on Designing a Virtual Highway Path Planner (Part 1/3)

I love Mithi’s series of posts on the Path Planning Project. Her first post covers the project outline and her solution design process. The second post covers her data structures and pipeline. The third and final post dives into the mechanics and math required to actually produce a path. This is a great series of posts for anybody thinking about building a path planner.
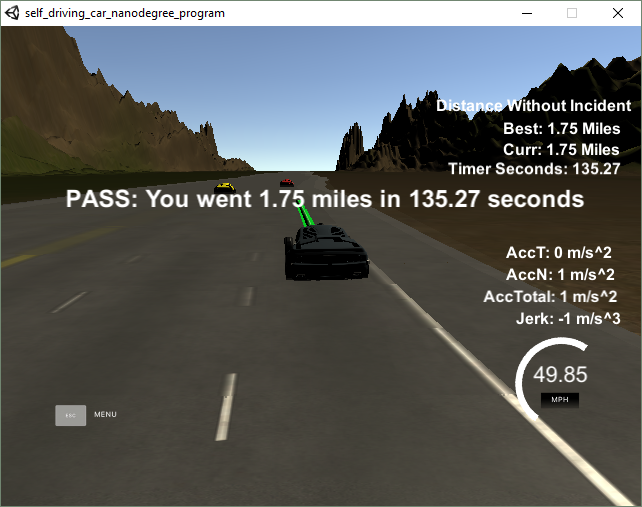
The goal is to create a path planning pipeline that would smartly, safely, and comfortably navigate a virtual car around a virtual highway with other traffic. We are given a map of the highway, as well as sensor fusion and localization data about our car and nearby cars .We are supposed to give back a set of points
(x , y)in a map that a perfect controller will execute every 0.02 seconds. Navigating safely and comfortably means we don’t bump into other cars, and we don’t exceed the maximum speed, acceleration, and jerk requirements. Navigating smartly means we change lanes when the car in front of us is too slow.
Path Planning in Highways for an Autonomous Vehicle
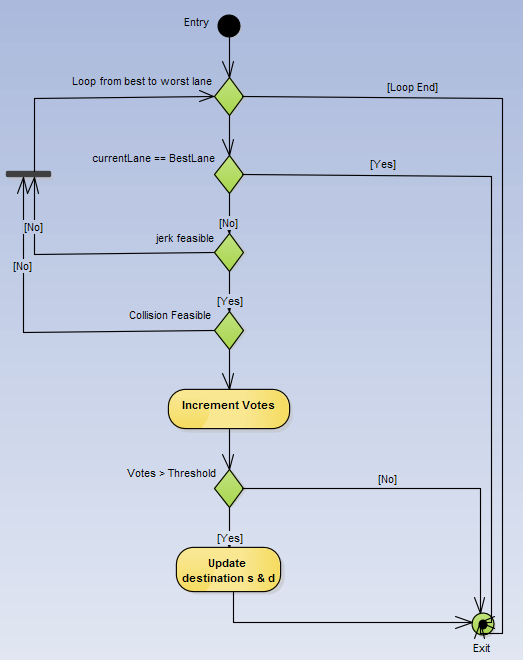
In contrast to Mithi’s articles, which take you through her process of building a path planner, Mohan’s writeup does a great job of describing the final result. In particular, I was interested to read about the voting system he used for deciding on lane changes.
Instead of quoting Mohan, I’ll share the flowchart he built:
Self-Driving Car Engineer Diary — 11

This installment of Andrew’s long-running “diary” covers the Path Planning Project at a high level, and details how it fits into the third term of the Nanodegree program. Like his fellow classmates, Andrew also found this to be a challenging project.
I found the path planning project challenging, in large part due to fact that we are implementing SAE Level 4 functionality in C++ and the complexity that comes with the interactions required between the various modules.
Udacity Self Driving Car — Project 11 Path planning
Shyam’s post contains a particularly concise 6-point walkthrough of trajectory generation, which is both fundamental to building a path planner, and surprisingly challenging.
The trajectory generation part which is the most difficult is covered as part of the project walk-through by Aaron Brown and David Silver. LINK. They recommend using the open source C++ tk:spline() method to generate a 5th degree polynomial which help minimize jerk while accelerating, decelerating and changing lanes.
Highway Path Planning
Alena touches on several interesting points with her post. She focuses on cost functions, which she identifies as the most important part of the project. The post describes her finite state machine and the associated cost functions in detail, and describes how the car decides when to shift lanes. She also touches on how she merged the two branches of her path planner — one for the Nanodegree project, and one for the Bosch Challenge — to create a more generalized planner.
The most important part of the project is to define cost functions. Let’s say we are on a highway with no other cars around. In such situation, we should stay in the same lane. Constant lane changing is extremely uncomfortable, so my first cost function is change_lane_cost. We penalized our trajectory if we want to change lane. Honestly, I did a small trick for Bosch challenge. I did not penalize the trajectory if I want to move in the middle lane. It gives me more freedom with maneuvers. Otherwise, I can be stuck in the left-most and right-most lanes when my lane and middle lanes are busy.
Seeing our students working through these challenges, experiencing their solutions, and learning about their processes fills me with so much excitement about the future of this field—these students represent the next generation of self-driving car engineers, and based on the work they’re already doing, I am certain they’re going to be making incredible contributions. I am especially moved by their generosity in taking the time to share in such detail the work they’re engaged in, and it’s a real pleasure to share their articles with you.
~
Ready to start working on self-driving cars yourself? Apply for our Udacity Self-Driving Car Engineer Nanodegree program today!
