
Udacity Self-Driving Car Engineer Nanodegree program students are taking their newly-mastered skills into the broader world, and their projects are incredible!
The talent and passion of students in Udacity’s Self-Driving Car Engineer Nanodeegree Program regularly astounds me. Here are five independent projects that students did outside of the program to build their skills as autonomous vehicle engineers.
OpenCV Python Neural Network Autonomous RC Car
Check out the autonomous hardware package strapped to the top of this tiny red range rover! And the various test track configurations it navigates. Super cool.
ConvNets Series. Spatial Transformer Networks
Spatial Transformers are modules that can be inserted into convolutional neural network architectures to focus the network on the most important object in the image. This is helpful because scale and rotation make object localization (finding an object within an image) a complex problem.
“The STN is a differentiable module which can be injected in a convolutional neural network. The default choice is to place it right “after” the input layer to make it learn the best transformation matrix theta which minimizes the loss function of the main classifier (in our case, this is IDSIA).”
Building an Autonomous Car using a 1/10th Scale RC Car — Part 1

This is an awesome four-part series on building a miniature self-driving car from scratch, with a big emphasis on hardware and electrical engineering. Part 1 is ROS setup, Part 2 is the sensor suite, Part 3 is the microcontroller, and Part 4 is working with the NVIDIA Jetson TX1. This is quite the hacker project.
“The goal of this project is to build an autonomous base that can navigate the sidewalks of my subdivision. It will use GPS, LIDAR, and other sensors to navigate to GPS way points, avoid obstacles, and return to the start position.”
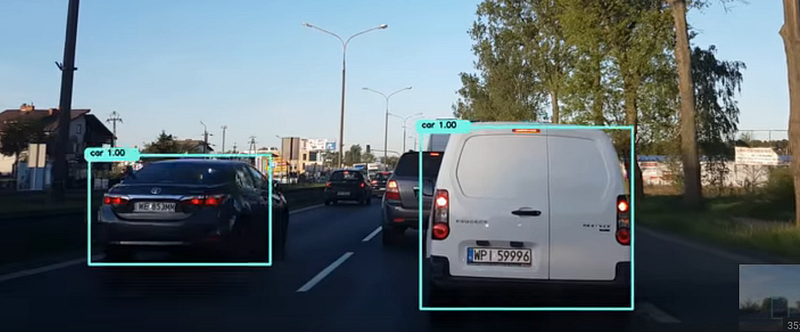
4K SSD Object Detection #1
I love watching videos that students shoot themselves. Here Karol is applying a Single-Shot Detector (SSD) network to identify other vehicles on the road.
Building an affordable self-driving car development platform

Scaling up from miniature self-driving cars to human-sized self-driving cars, Bogdan outlines a self-driving car development platform accessible for under US$10,000. This does not include the sensor suite — just the drive-by-wire platform. He settled on the Renault Twizy and is looking for partners to work on this with him 🙂
“One of the main challenges in the self-driving car industry (among other things like technology itself, policy updates, ethical issues, etc.) is the barrier of entry. If you are a small start up building a local autonomous delivery service or a single engineer trying out latest deep learning approaches for car/traffic sign detection, it is incredible hard (sometimes even impossible) to get things off the ground and test your solution in the real world setting.”
These amazing engineers are skilled, passionate, and actively building. If you like the idea of engaging with innovators like these, you should enroll in the Udacity Self-Driving Car Engineer Nanodegree Program!
