In these projects, students showcase initiative, creativity, and work ethic, as they build projects focused on topics like perception, deep learning, and computer vision.
Students always tell us that perception, deep learning, and computer vision are some of their favorite topics in the Udacity Self-Driving Car Engineer Nanodegree Program.
Their intense interest in these topics translates directly to the high quality of their work. Today, I’d like to share three especially impressive student projects with you that cover these areas!
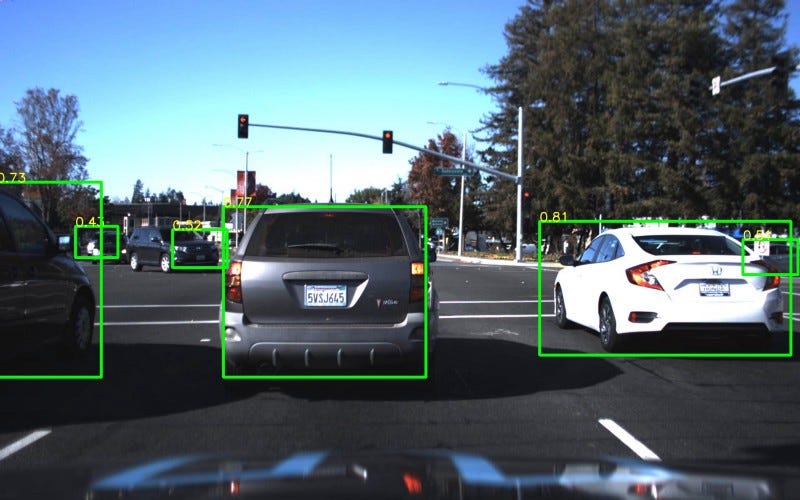
Implementing YOLO using ResNet as Feature extractor
I love this project! Mohammad did it on his own, and he went way beyond the requirements of the Nanodegree program to do so. That’s going to serve him well in the long run, because employers love it when talented students get so deep into particular subjects, that they start building their own projects to further flesh out their ideas and test their skills.
“In this project I have used a pre-trained ResNet50 network, removed its classifier layers so it becomes a feature extractor, and then added the YOLO classifier layer instead (randomly initialized). I then trained the network on Udacity’s CrowdAI dataset to detect cars in video frames.”
Semantic Segmentation
Enrique used VGG-16 to create a semantic segmentation network for the Advanced Deep Learning project in the Nanodegree program. He trained that network using the KITTI dataset, and then applied the network to scenes he recorded driving in Mexico. Check out his YouTube videos!
“The original FCN-8s was trained in stages. The authors later uploaded a version that was trained all at once to their GitHub repo. The version in the GitHub repo has one important difference: The outputs of pooling layers 3 and 4 are scaled before they are fed into the 1×1 convolutions. As a result, some students have found that the model learns much better with the scaling layers included. The model may not converge substantially faster, but may reach a higher IoU and accuracy.”
Machine Learning for Vehicle Detection

Moataz built a vehicle detection pipeline combining histogram of oriented gradients, support vector machines, and sliding window search. I particularly like the heatmap he employs to reduce false positives in vehicle detection. This is a great example of going beyond the steps outlined in the Nanodegree program, to build a truly standout project.
“Now given the simplicity of the SVM model, we expect some detections to be false positives. In order to filter out these incorrect detections, one approach is to threshold our positive windows such that we only pick areas where more than one window overlap. In essence we are generating a heatmap of the positive windows.”
Udacity practices project-based learning, which means all of our students in all of our Nanodegree programs build projects like these. This approach enables you to learn practical skills, and to build a dynamic portfolio populated with completed projects that clearly showcase your new skills and experience.
If you’re interested in building amazing projects around perception, deep learning, or any other project related to self-driving cars, you should join our Intro to Self-Driving Cars Nanodegree Program, or our Self-Driving Car Engineer Nanodegree Program!
See you in the classroom, and I can’t wait to see what you build!