For years, autonomous vehicle development in the US has happened primarily in three locations: Detroit, Silicon Valley, and Pittsburgh.
Detroit because it’s the center of the US automotive industry, Silicon Valley because it’s the center of the US technology industry, and Pittsburgh because…why?
Basically because Pittsburgh is home to the vaunted Carnegie Mellon University Robotics Institute, which counts among its alumni such robotic luminaries as Red Whittaker, Sebastian Thrun, and Chris Urmson. Researchers from the Robotics Institute were famously lured away en masse by Uber, but the academic center appears to have recovered, and the net result has been to make Pittsburgh the home of not only Uber ATG, but also other autonomous vehicle companies like Argo AI and Aptiv.
Here’s a quick readout of the job counts for “autonomous vehicle” on Indeed.com right now:
Mountain View (Silicon Valley): 446
Detroit: 226
Pittsburgh: 86
Boston: 86
So what’s up with Boston?
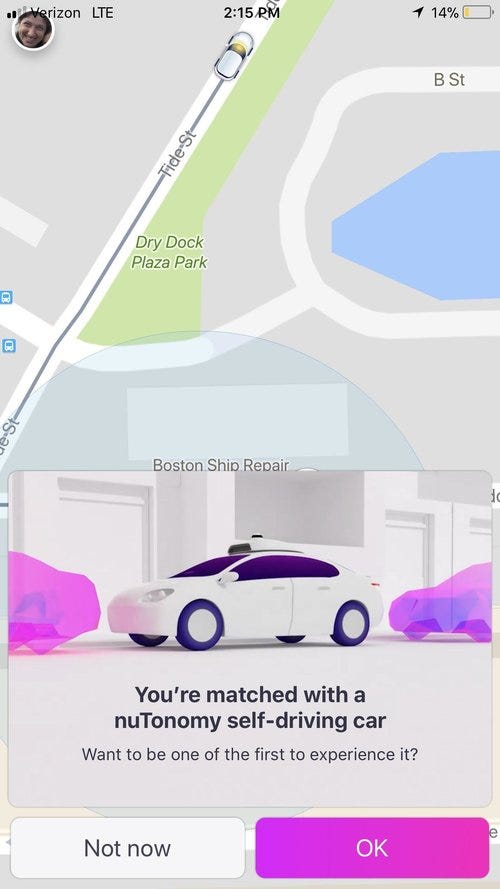
Partly nuTonomy, which Aptiv (formerly Delphi) purchased for a rumored $450 MM. And of course MIT and their own vaunted Computer Science and Artificial Intelligence Lab (CSAIL).
But further inspection shows Boston potentially has a more robust autonomous vehicle industry than Pittsburgh. Indeed.com shows essentially all Pittsburgh’s autonomous vehicle jobs coming from three companies: Aptiv, Argo, and Uber.
On the other hand, Boston’s autonomous vehicle jobs come from: Square Robot, Liberty Mutual, nuTonomy, Draper, MathWorks, Aurora, Optimus Ride, Lux Research, and the list goes on. That’s a diversified and presumably robust jobs base. Plus, Aptiv just announced a new Boston-based autonomous technology center.
Keep an eye on Beantown.