
Earlier this fall I spoke about how self-driving cars work at TEDxWilmington’s Transportation Salon, which was a lot of fun.
The frame for my talk was a collection of projects students have done as part of the Udacity Self-Driving Car Engineer Nanodegree Program.
So, how do self-driving cars work?
Glad you asked!
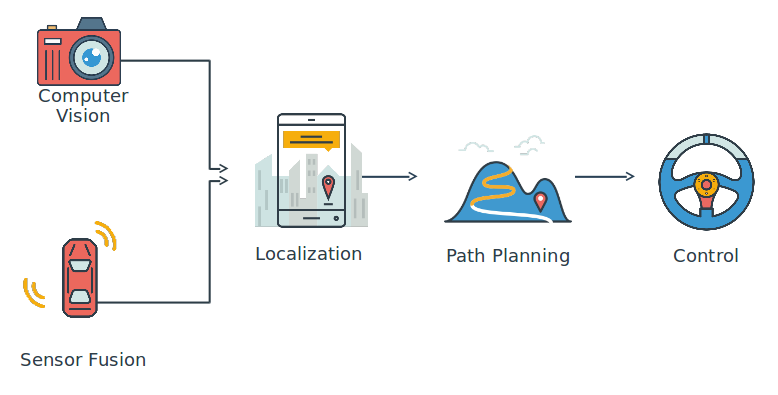
Self-driving cars have five core components:
- Computer Vision
- Sensor Fusion
- Localization
- Path Planning
- Control
Computer vision is how we use cameras to see the road. Humans demonstrate the power of vision by handling a car with basically just two eyes and a brain. For a self-driving car, we can use camera images to find lane lines, or track other vehicles on the road.
Sensor fusion is how we integrate data from other sensors, like radar and lasers—together with camera data—to build a comprehensive understanding of the vehicle’s environment. As good as cameras are, there are certain measurements — like distance or velocity — at which other sensors excel, and other sensors can work better in adverse weather, too. By combining all of our sensor data, we get a richer understanding of the world.
Localization is how we figure out where we are in the world, which is the next step after we understand what the world looks like. We all have cellphones with GPS, so it might seem like we know where we are all the time already. But in fact, GPS is only accurate to within about 1–2 meters. Think about how big 1–2 meters is! If a car were wrong by 1–2 meters, it could be off on the sidewalk hitting things. So we have much more sophisticated mathematical algorithms that help the vehicle localize itself to within 1–2 centimeters.
Path planning is the next step, once we know what the world looks like, and where in it we are. In the path planning phase, we chart a trajectory through the world to get where we want to go. First, we predict what the other vehicles around us will do. Then we decide which maneuver we want to take in response to those vehicles. Finally, we build a trajectory, or path, to execute that maneuver safely and comfortably.
Control is the final step in the pipeline. Once we have the trajectory from our path planning block, the vehicle needs to turn the steering wheel and hit the throttle or the brake, in order to follow that trajectory. If you’ve ever tried to execute a hard turn at a high speed, you know this can get tricky! Sometimes you have an idea of the path you want the car to follow, but actually getting the car to follow that path requires effort. Race car drivers are phenomenal at this, and computers are getting pretty good at it, too!
The video at the beginning of this post covers similar territory, and I hope between that, and what I’ve written here, you have a better sense of how Self-Driving Cars work.
Ready to start learning how to do it yourself? Apply for our Self-Driving Car Engineer Nanodegree program, or enroll in our Intro to Self-Driving Cars Nanodegree program, depending on your experience level, and let’s get started!
