Baidu’s Apollo program has announced a self-driving car test in Changsha, Hunan, China, that is open to the general public. The program features 45 self-driving L4 Hongqi EV vehicles, the result of a joint partnership with FAW Group.
It’s always a little hard to know exactly what’s happening in China, because the non-Chinese press struggles with both access and language. The articles I’ve read use phrases like, “debuted”, “are being released”, and “kicked off”. Sounds like the program is already underway?
There is a human safety driver onboard, of course, and the geofence is limited to about 30 miles, although Baidu intends to expand.
Self-driving car deployments are trickling out, albeit not quite as fast as many of us had hoped. Opening up programs to the general public, as opposed to a limited and pre-screened group, is a big step forward.
I’m excited that Baidu is doing this. And I would love to see a video or writeup of what it’s like.
I came to Udacity three years ago to build the Self-Driving Car Engineer Nanodegree Program. Since then, we’ve had thousands of students enroll in and graduate the program, and we’ve built other Nanodegree programs:
My Udacity colleagues Leah Wiedenmann and Vienna Harvey compiled a list of female leaders in the automotive industry. Their goal is to help more conferences invite female speakers.
I imagine this list will be helpful to journalists and researchers, as well.
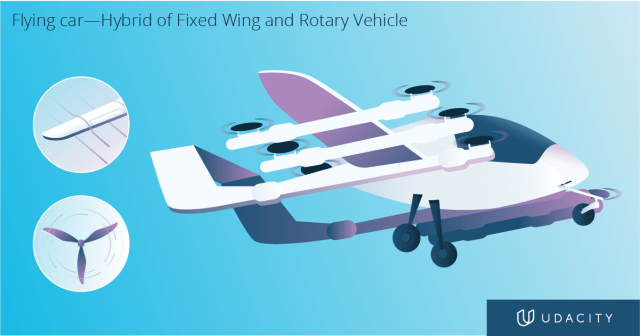
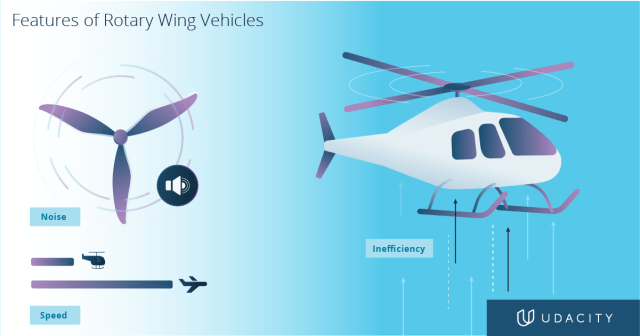
You might be able to deduce the strengths and weaknesses of each modality from these nifty graphics, but you should read the whole post for more 😊 🚁 ✈️
“Neolix, a start-up so Chinese that it has only barely has an English-language website, has announced mass-production of its autonomous delivery vehicles and declared itself the first company in the world to do this, according to Bloomberg.”
“Perhaps radar is even underappreciated. Venture capital has flowed into lidar and camera-based solutions for automated vehicles; radar has been viewed as a commodity.”
That seems right to me.
The article highlights three companies working on different approaches to more advanced radar for self-driving cars. The work from Bosch to create radar-based high-definition maps seems particularly interesting.
“By coupling these two inputs [radar and GPS], Bosch’s system can take that real-time data and compare it to its base map, match patterns between the two, and determine its location with centimeter-level accuracy.”
Bosch calls this approach, “radar road signature” and posits that it can provide centimeter-level accuracy while using half as much data as a camera-based map.
Bosch is highlighting their work with TomTom to build radar-based HD maps. They divide these maps into three layers:
Localization: calculating where the car is in the world
Planning: deciding which actions are available to the car
Dynamic: predicting what other actors in the environment will do
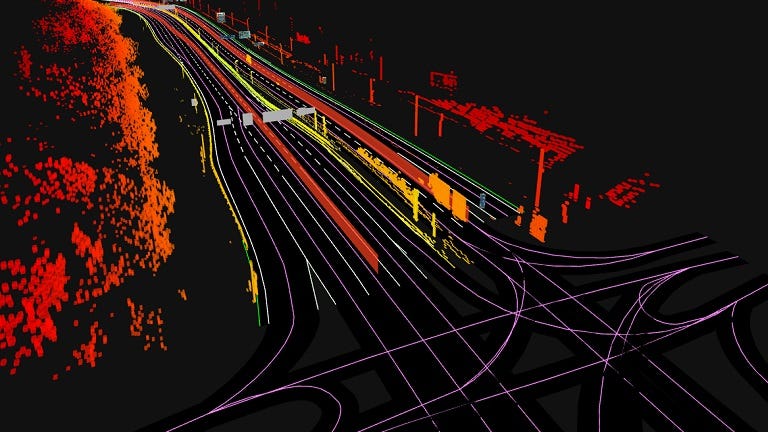
This is exciting work because high-definition (HD) maps are usually the domain of lidar. Lidar point clouds are used to generate maps against which a vehicle can compare later sensor readings.
Some work has gone into attempts to build such maps with camera data. Visual SLAM is one example of this. By comparison, relatively little work has gone into building HD maps from radar data. That makes Bosch’s endeavor novel and exciting.
Bosch is positioning this as a fleet-based mapping system, with map data generated by ordinary consumer cars, not necessarily specialized mapping vehicles. It’s hard to know how realistic that really is, but it would play to Bosch’s strength of scale.
“One million vehicles will keep the high-resolution map up to date.”
As the world’s largest automotive supplier, Bosch has a unique ability to pump a success into the automotive market.
Ford CTO Ken Washington, who used to be like my boss’s boss’s boss’s boss’s boss when I was at Ford, and seems like a great guy, has a post up about Digit, a humanoid robot that Ford is working on for last-mile deliveries.
Reading the post and watching the video, I have a few reactions:
This is awesome.
This will be insanely hard.
Giving a robot a lidar for a head is a stroke of genius, at least from an aesthetic perspective.
Ford is completely right that the last-mile (really, last-ten-yards) delivery problem is going to be a huge issue. Right now logistics companies rely on drivers to both operate a vehicle and to walk deliveries to customers’ front doors. Self-driving cars solve the first problem, but in a lot of cases that won’t ultimately have much of an impact if we can’t solve the second task.
So the motivation for Digit is spot-on.
But walking robots are bananas-level difficult.
Look no further than this video with the awesome title, “A Compilation of Robots Falling Down at the DARPA Robotics Challenge”:
Granted, this video is from 4 years ago and progress has been made, but my impression is that walking robots make self-driving cars look like an easy problem.
I remember taking an edX course from Russ Tedrake at MIT called “Underactuated Robotics” that was concerned with, among other things, walking robots. This course was so, so hard. The control problems inherent in a multi-joint, walking robot are of a staggering level of mathematical complexity.
Digit’s demo video is awesome, but we’ve all learned to be skeptical of demo videos. If Ford, together with Agility Robotics, can really crack the nut on a walking robot that can deliver packages, then they won’t even need to solve the autonomous vehicle problem. They’ll have the whole world beating down their door.
The goal of this program is to offer a much deeper dive into perception and sensor fusion than we were able to do in our core Self-Driving Car Engineer Nanodegree Program. This is a great option for students who want to develop super-advanced, cutting-edge skills for working with lidar, camera, and radar data, and fusing that data together.
The first three months of the program are brand new content and projects that we’ve never taught before. The final month, on Kalman filters, comes from our core Self-Driving Car Nanodegree Program. The course is designed to last four months for new students. Students who have already graduated the core Self-Driving Car Engineer Nanodegree Program should be able to finish this specialized Sensor Fusion Nanodegree Program in about three months.
Curriculum
Course 1: Lidar Instructor:Aaron Brown, Mercedes-Benz Lesson: Introduction. View lidar point clouds with Point Cloud Library (PCL). Lesson: Point Cloud Segmentation. Program the RANSAC algorithm to segment and remove the ground plane from a lidar point cloud. Lesson: Clustering. Draw bounding boxes around objects (e.g. vehicles and pedestrians) by grouping points with Euclidean clustering and k-d trees. Lesson: Real Point Cloud Data. Apply segmentation and clustering to data streaming from a lidar sensor on a real self-driving car. Lesson: Lidar Obstacle Detection Project. Filter, segment, and cluster real lidar point cloud data to detect vehicles and other objects!
Course 2: Radar Instructor:Abdullah Zaidi, Metawave Lesson: Radar Principles. Measure an object’s range using the physical properties of radar. Lesson: Range-Doppler Estimation. Perform a fast Fourier transform (FFT) on a frequency modulation continuous wave (FMCW) radar signal to create a Doppler map for object detection and velocity measurement. Lesson: Clutter, CFAR, AoA. Filter noisy radar data in order to reduce both false positives and false negatives. Lesson: Clustering and Tracking. Track a vehicle with the Automated Driving System Toolbox in MATLAB. Lesson: Radar Target Generation and Detection Project. Design a radar system using FMCW, signal processing, FFT, and CFAR!
Course 3: Camera Instructor:Andreas Haja, HAJA Consulting Lesson: Computer Vision. Learn how cameras capture light to form images. Lesson: Collision Detection. Design a system to measure the time to collision (TTC) with both lidar and camera sensors. Lesson: Tracking Image Features. Identify key points in an image and track those points across successive images, using BRISK and SIFT, in order to measure velocity. Project: 2D Feature Tracking. Compare key point detectors to track objects across images! Lesson: Combining Camera and Lidar. Project lidar points backward onto a camera image in order to fuse sensor modalities. Perform neural network inference on the fused data in order to track a vehicle. Lesson: Track An Object in 3D. Combine point cloud data, computer vision, and deep learning to track a moving vehicle and estimate time to collision!
Course 4: Kalman Filters Instructors: Dominic Nuss, Michael Maile, and Andrei Vatavu, Mercedes-Benz Lesson: Sensors. Differentiate sensor modalities based on their strengths and weaknesses. Lesson: Kalman Filters. Combine multiple sensor measurements using Kalman filters — a probabilistic tool for data fusion. Lesson: Extended Kalman Filters. Build a Kalman filter pipeline that smoothes non-linear sensor measurements. Lesson: Unscented Kalman Filters. Linearize data around multiple sigma points in order to fuse highly non-linear data. Project: Tracking with an Unscented Kalman Filter. Track an object using both radar and lidar data, fused with an unscented Kalman filter!
Partners
One of the highlights of working at Udacity is partnering with world experts to teach complex skills to anybody in the world.
In this program we are fortunate to work especially closely with autonomous vehicle engineers from Mercedes-Benz. They appear throughout the Nanodegree Program, often as the primary instructors, and sometimes simply offering their expertise and context on any other topic.
MathWorks has also proven terrific partners by offering our students free educational licenses for MATLAB. The radar course in this program is taught primarily in MATLAB and leverages several of their newest and most advanced toolboxes.
That sums up how I felt building this Nanodegree Program. We spent over a year kicking around ideas for this program, starting work and stopping work, and there were times I thought it wasn’t going to happen. Then we got the right group of instructors together it came together faster than I ever imagined, and it’s beautiful.
I’ve been thumbing through Sebastian’s magnum opus, Probabilistic Robotics. The book is now13 years old, but it remains a great resource for roboticists. Kind of funny to think that, when Sebastian wrote this, he hadn’t even started to work on self-driving cars yet!
The chapter on Markov decision processes (MDPs) covers how to make robotic planning decisions under uncertainty. One of the key assumptions of MDPs is that the agent (robot) can observe its environment perfectly. This turns out to be an unrealistic assumption, which leads to further types of planning algorithms, principally partially observable Markov decision processes (POMDPs).
Nonetheless, ordinary Markov decision processes are a helpful place to start when thinking about motion planning.
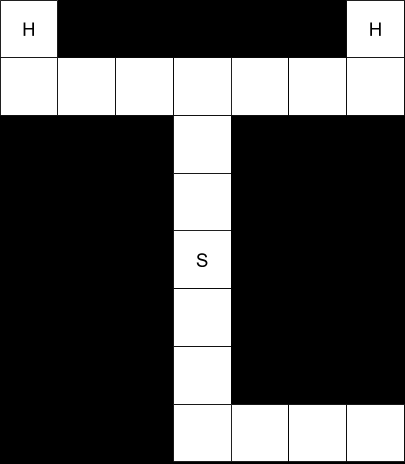
“In this exercise, you are asked to extend dynamic programming to an environment with a single hidden state variable. The environment is a maze with a designated start marked “S”, and two possible goal states, both marked “H”.
“What the agent does not know is which of the two goal states provides a positive reward. One will give +100, whereas the other will give -100. There is a .5 probability that either of those situations is true. The cost of moving is -1; the agent can only move into the four directions north, south, east, and west. Once a state labeled “H” has been reached, the play is over.”
So far, so good.
“(a) Implement a value iteration algorithm for this scenario. Have your implementation compute the value of the starting state. What is the optimal policy?”
The optimal policy here depends on whether we assume the agent must move. If the agent is allowed to remain stationary, then the value of the starting state is 0, because the optimal policy is to stay put.
Calculating the expected reward from reaching state “H” is straightforward. The expected reward is 0, because there’s a 50% chance of a +100 reward, but also a 50% chance of a -100 reward.
0.5 * (+100) + 0.5 * (-100) = 50 + (-50) = 0
Once we establish that, the optimal policy is intuitive. There is no positive reward for reaching any state, but there is a cost to moving to any state. Don’t incur a cost if there’s no possible reward.
The optimal policy changes, however, if the rules state that we must move. In that case, we want to end the game as quickly as possible.
Under this set of rules, the value function decreases as we approach either “H”. The intuition is that the game has no benefits, only costs, so we want to end the game as quickly as possible. From a policy perspective, we want to follow the gradient toward higher values, so if we start at “S”, we wind up trending toward “H”.
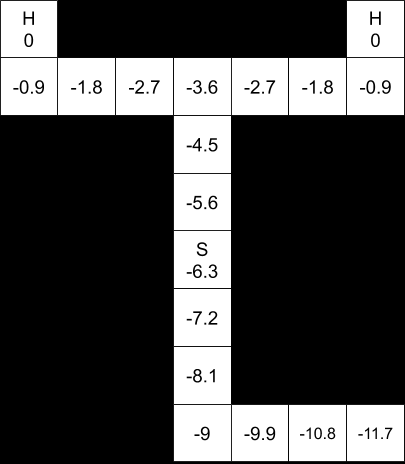
“(b) Modify your value algorithm to accommodate a probabilistic motion model: with 0.9 chance the agent moves as desired; with 0.1 chance it will select any of the other three directions at random. Run your value iteration algorithm again, and compute both the value of the starting state, and the optimal policy.”
Once again, the optimal policy depends on whether we can remain stationary. If we can remain stationary, then the value of all cells is 0, and the optimal policy is to stay put. The uncertainty in motion that has just been introduced does not affect the policy, because there’s still no reward for moving anywhere.
If, however, we are required to move, calculating the policy becomes more complex. At this point we really need a computer to calculate the value function, because we have to iterate over all the cells on the map until values converge. For each cell, we have to look at each action and sum the 90% probability that the action will execute properly, and the 10% probability that the action will misfire randomly. Then we pick the highest-value action. Once we do this for every cell, we repeat the cycle over all the cells again, and we keep doing this until the values stabilize.
The first pass in the iteration sets all cells to 0. Depending on which direction we iterate from, the next step might look like this:
Nonetheless, even without a computer, it seems pretty clear that the optimal policy is still for our agent to stay put in the start cell. Without any information about which “H” is heaven and which is hell, there’s no ultimate reward for going anywhere.
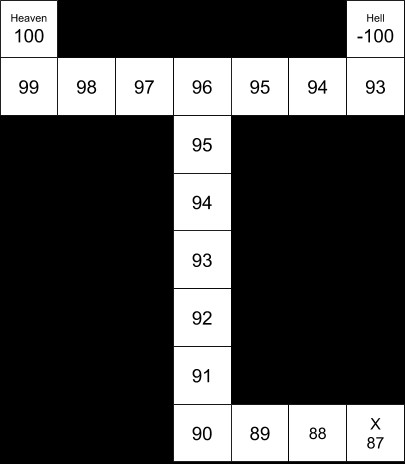
“(c) Now suppose the location labeled X contains a sign that informs the agent of the correct assignment of rewards to the two states labeled “H”. How does this affect optimal policy?”
Without computing the policy, it seems likely that the optimal policy will involve going to the sign, identifying heaven and hell on the map, and then proceeding to heaven.
This policy seems qualitatively clear because of the relatively high payoff for reaching heaven (+100), the relatively low cost of motion (-1), the relatively high probability of the motion executing accurately (0.9), and the relatively small size of the map (distance from S to X to H = 19).
It’s easy to imagine tweaking these parameters such that it’s no longer so obvious that it makes sense to go find the sign. With different parameters, it might still make sense to stay put at S.
“(d) How can you modify your value iteration algorithm to find the optimal policy? Be concise. State any modifications to the space over which the value function is defined.”
Basically, we need to figure out the value of reaching the sign. There are essentially two value functions: the value function when we cannot observe the state, and the value function when we can.
Another way to put this is that going to the sign is like taking a measurement with a sensor. We have prior beliefs about the state of the world before we reach the sign, and then posterior beliefs once we get the information from the sign. Once we transition from prior to posterior beliefs, we will need to recalculate our value function.
An important point here is that this game assumes the sign is 100% certain, which makes the model fully observable. That’s not the case with normal sensors, which is why real robots have to deal with partially observable Markov decision processes (POMDPs).
“(e) Implement your modification, and compute both the value of the starting state and the optimal policy.”
Again, we’d need to write code to actually implement this, but the general idea is to have two value functions. The value of X will be dependent on the posterior value function (the value function that we can calculate once we know which is heaven and which is hell). Then we use that value of X to calculate our prior distribution.
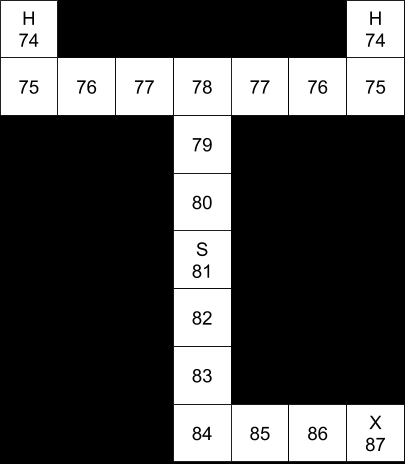
For example, here are the value functions, assuming perfect motion:
The posterior value function, after reading the sign at “X”.The prior value function, before reading the sign at “X”.
A few weeks ago I interviewed commercial pilot and retired Navy fighter pilot Paco Chierici about autonomous flight, and his new novel, Lions of the Sky.