Talking Self-Driving Cars with Baidu’s Apollo team in China, and visiting Udacity’s offices in Shanghai and Beijing!
This past week I had the pleasure of visiting China for the first time in 20 years! I spent a few days working with colleagues at Udacity’s office in Shanghai, and followed that with several days at Udacity’s Beijing office. I was also able to take in some additional Beijing-based events. It was a whirlwind tour, and I loved it!
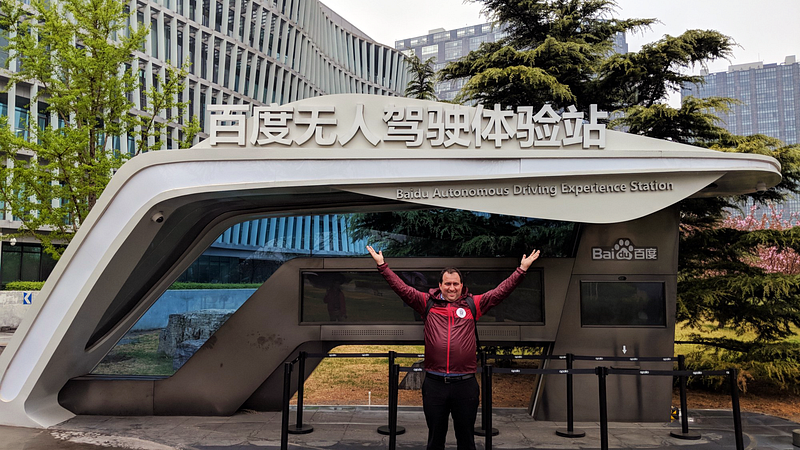
My traveling group was hosted by the terrific Apollo team at Baidu. Baidu is China’s largest search engine company, and one of the largest Internet companies in the world. And Udacity is building a free self-driving car course with them!
“Together with Baidu, we look forward to popularizing the Apollo system, and to giving everyone the opportunity to become a self-driving car engineer.” — Sebastian Thrun
This course will provide a conceptual overview of self-driving car technology, illustrated with the Apollo open-source self-driving car stack that Baidu is building.
Baidu has invested heavily in self-driving cars and has rapidly become an important player in the ecosystem. They are already testing vehicles on their Beijing campus.
Their vehicles come in all shapes and sizes. Some of Baidu’s vehicles look like Carla, Udacity’s very own self-driving car.


But Baidu has 13 different types of self-driving vehicles, ranging from small cars to big trucks!
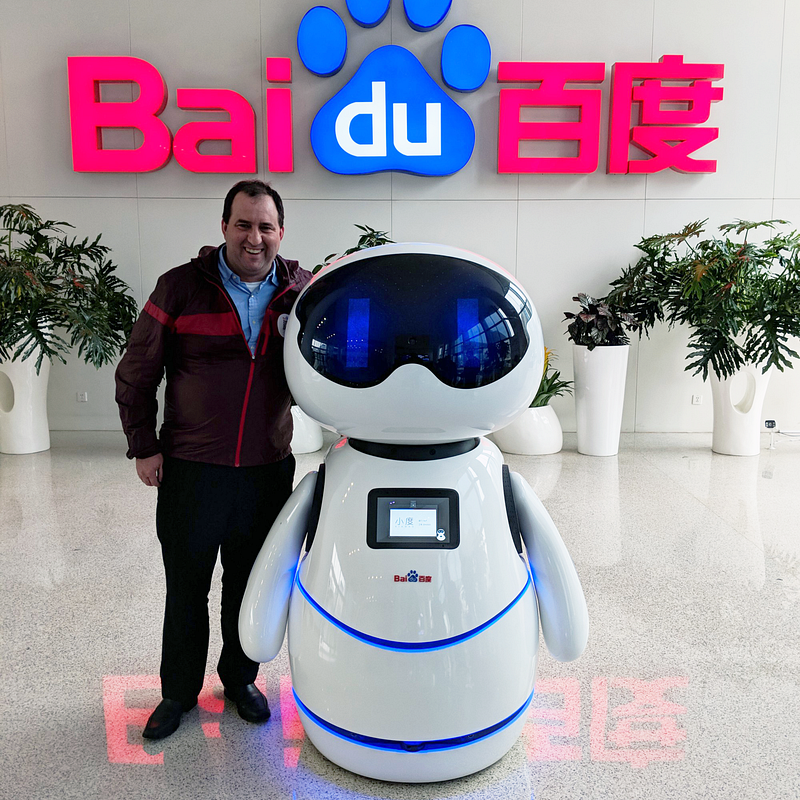
Beyond autonomous vehicles, Baidu has a world-leading artificial intelligence group. In their lobby I got to play with one of their robots, which talked, snapped my photo, and walked around with me.
The Baidu team was also kind enough to arrange and host an on-camera interview for me, with CSDN, a Chinese software developer network.

The most important part of the visit, however, were the ping-pong matches. I played two matches and went 1–1 in my first international ping-pong competition. No photos, you’ll have to take my word for it 🙂