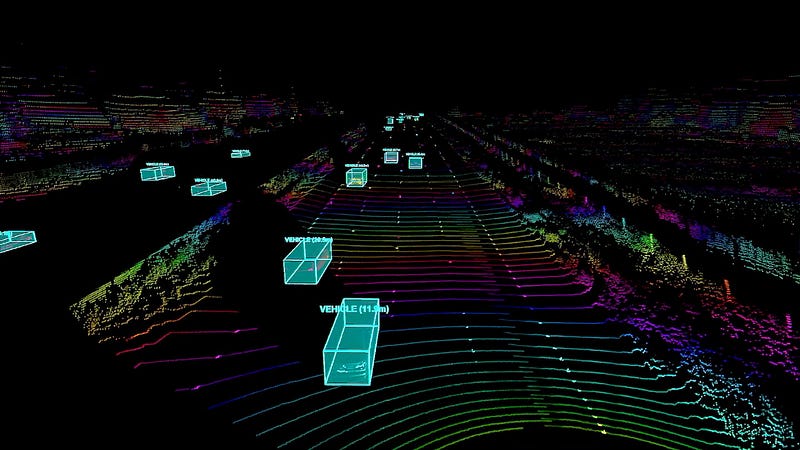
Ford’s dataset includes multiple driving environments, multiple sensor modalities, multiple vehicles, and multiple seasons, on a consistent 66 km route in the Detroit area.
“Soon, your Volvo will be able to drive autonomously on highways when the car determines it is safe to do so,” said Henrik Green, chief technology officer for Volvo Cars.
That sounds a lot like Level 3 autonomy. The timing of this announcement is particularly interesting, coming right on the heels of Audi retreating from Level 3 — due to liability concerns.
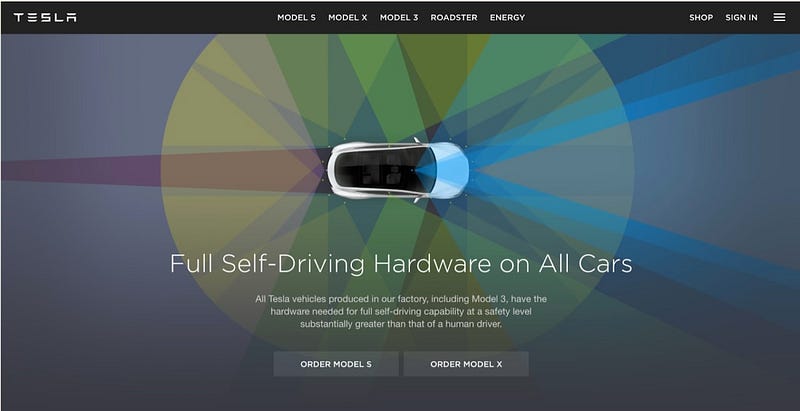
The Volvo ADAS systems I’ve tested out in the past have always been quite impressive — in the top tier of systems behind Tesla Autopilot. If there is one way for competitors to catch and surpass Tesla, it might be exploiting the lidar technology that Tesla has famously eschewed.
Now, three years later, Audi has announced Level 3 won’t be coming to the A8. Surprisingly, Audi attributes this about-face to legislation, not technology.
“Currently, there is no legal framework for Level 3 automated driving and it is not possible to homologate such functions anywhere in the world in a series production car.”
Apparently the lawyers got nervous that customers might not service and maintain their cars, then the vehicles would crash, and Audi would be on the hook.
If the real issue here is liability, not technology, that suggests the first movers toward Level 3 vehicles will be companies with very little to lose. So maybe not Tesla, which is now the most valuable American automaker, by an order of magnitude.
Maybe Level 3 will come from some small startup that doesn’t have to worry about losing billions of dollars in market capitalization that it never had in the first place.
Last fall, a wide consortium of autonomous vehicle companies published, “Safety First for Automated Driving”, a whitepaper aimed as filling the standards gap between ISO 26262 (Functional Safety), ISO 21448 (Safety of the Intended Functionality — SOTIF), and the reality of where self-driving cars are heading.
According to EE Times, this whitepaper is on its way to becoming its own ISO standard. That would provide a clear and consensus view of how to approach safety for autonomous vehicles, which has been lacking in the industry up to this point.
At 157 pages, the whitepaper is thorough but digestible. Over the coming weeks I’ll try to break down the contents chapter-by-chapter, to see what the industry consensus is.
Andrei Karpathy is one of the most impressive and celebrated computer scientists in the world, and has worked for the past several years as Senior Director, AI, at Tesla. Essentially, he leads their Autopilot team.
Reilly Brennan’sFuture of Transportation newsletter (you should subscribe) pointed to a talk Karpathy recently gave at a conference called ScaledML. It’s pretty great, so I decided to annotate it, as a way to capture all of the details for myself, as much as anything else.
[00:00] Karpathy’s title is Senior Director. I remember him joining Tesla as a Director, so I think he got a promotion. Congratulations!
[00:19] Karpathy starts by defining what Autopilot is. This seems like good presentation technique. Establish the basics before moving on to advanced topics.
[00:50] Karpathy shows 8 Tesla vehicle models, noting that some of them have “only been announced.” Models S, 3, X, Y, T(ruck), A(TV — joking?), R, and S(emi). Globally Tesla has over 1 million vehicles.
[01:35] Autopilot has 3 billion miles, “which sounds(?) like a lot.”
[01:58] “We think of it (Autopilot) as roughly autonomy on the highway.” Sounds like Level 3 to me.
[02:24] “Smart Summon is quite magical, when it works (audience laughs).” I actually don’t know, is Smart Summon unreliable?
[03:12] Euro NCAP has rated Teslas as the safest vehicles, which isn’t a surprise but also puts the Autopilot lawsuits in perspective.
[03:45] Karpathy shows some examples of Tesla safety features working, even when Autopilot is not turned on. Probably this means that Karpathy’s team is working on the broader array of safety features, not just Autopilot.
[04:43] “The goal of the team is to produce full self-driving.” Karpathy has always struck me as more reliable and realistic than Musk. “Full Self-Driving” means more coming from Karpathy.
[06:30] “We do not build high-definition maps. When we come to an intersection, we encounter it basically for the first time.” This is striking, and I don’t think I’ve heard Tesla put it quite like this before. Tesla is famous for eschewing lidar, but I wonder why they don’t build vision-based maps?
[08:00] Karpathy mentions that the neural networks on the car really have two separate tasks — (a) driving, and (b) showing the humans in the vehicle that the computer perceives the environment, so the humans trust the system.
[09:16] We see a photo of a crossing guard with a handheld stop sign, hanging loose from the guard’s limp arm. Karpathy calls this “an inactive state.” This really highlights to me how hard it is for a computer to know whether a stop sign is real or not.
[10:10] Karpathy mentions Tesla builds maps, “of course, but they’re not high-definition maps.” I wonder what kind of maps they are.
[10:35] The Autopilot team spends at least part of its day-to-day work going through the long-tail and sourcing examples of weird stop signs. And presumably other weird scenarios. Man that sounds like a grind — I would imagine they must automate or outsource a lot of that.
[11:15] Bayesian uncertainty in the neural network seems to play a role.
[12:21] When Tesla needs more data, they just send an extra neural network to their vehicle fleet and ask the cars to run that network in the background, gathering potential training images. I would be it will take traditional automotive companies a long time to develop this capability.
[13:16] Test-Driven Development! TDD for the win!
[14:37] HydraNet is a collection of 48 neural networks with a “shared backbone” and 1000 distinct predictions. This is a multi-headed neural network on steroids.
[14:59] “None of these predictions can ever regress, and all of them must improve over time.” I don’t really understand what he means here. Surely there must be times a network predicts a dog and then later realizes it’s a child, etc.
[15:15] Autopilot is maintained by “a small, elite team — basically a few dozen people.” Wow.
[15:54] The goal of the Tesla AI team is to build infrastructure that other, more tactical people can then use to execute tasks. They call this approach Operation Vacation. (ruh-ruh)
[16:46] For example, if somebody at Tesla wants to detect a new type of stop sign, they supposedly don’t even have to bother Karpathy’s team. The AI team has already built out all the infrastructure for the rest of Tesla to plug new “landmark” images into.
[17:56] Karpathy shows an occupancy tracker that looks like something out of a 2-D laser scanner from twenty years ago. I wonder if they’re basically using cameras to fake what lidars do (Visual SLAM, etc.).
[19:36] Autopilot code used to be a lot of C++ code, written by engineers. As the neural networks get better, they’re eating up a lot of that “1.0” codebase.
[19:51] Aha! The occupancy tracker is old, “1.0” code, written by people. The future is neural networks!
[20:00] There is a “neural net fusion layer, that stitches up the feature maps and projects to birds-eye view.”
[20:15] There is a “temporal module” that smoothes and a “BEV net decoder”. What is are these things? I probably need to spend a few weeks getting back up to speed on the latest neural network research.
[22:15] Karpathy shows off how well this system works, but it’s hard to follow and judge for myself.
[22:35] Tesla takes a “pseudo-lidar approach, where you predict the depth of every since pixel and you basically simulate lidar input purely from vision.” Why not just use lidar, then? The unit price is coming down. Probably Tesla can’t depend on lidar because it already has a million vehicles on the road, none of which have lidar, and many of which have paid for full self-driving already. Realistically, though, this sounds like Tesla will start to add lidar at some point.
[24:02] The gap between lidar and a camera’s ability to simulate lidar is “quickly shrinking.” What’s the gap now? Is this tracked somewhere in academic literature?
[24:36] The driving policy (the motion planning), is still human-coded. But not for long! This is where Tesla’s fleet really shines. Karpathy notes that their human drivers are basically building supervised motion planning datasets for free.
[26:17] Really nice job summarizing his own talk. It’s just amazing that one guy can be such a phenomenal computer scientist and also so skilled at communication — in a second language, no less!
[27:30] During Q&A, Karpathy notes that Tesla builds low-definition semantic maps, which somewhat contradicts his earlier statement that every intersection is basically approached as if it were a new intersection.
[29:45] The hand-coded, “software 1.0” stack is used to keep the neural network within “guardrails.”
Cruise has kept at least a portion of its self-driving fleet operating in San Francisco during the COVID pandemic. Those vehicles are focused on delivering meals to vulnerable populations in the city, according to Mashable.
This is a great move by Cruise, both because it keeps the vehicles up and running, and because it contributes to a societal need.
Without a larger mission, Cruise might find it hard to justify violating shelter-in-place restrictions by driving on city streets with two vehicle operators inside a prototype autonomous vehicle. But Cruise’s mission transforms the testing operation into an “essential” service, and justifiably so.
The goal of self-driving cars is to serve our communities in dangerous times and situations, like the pandemic in which we now find ourselves. The autonomous technology may not have fully arrived yet, but Cruise shows how we can achieve some of those goals in the here and now.
Recently, Waymo rolled out fully driverless vehicles to pre-approved riders living in suburban Arizona. Ed Niedermeyer has a great article (and video) in TechCrunch.
My former boss, and Voyage CEO, Oliver Cameron is a bit astounded that this event has passed with barely a ripple in the news cycle, as am I.
The lack of attention is, in some ways, a good thing.
Suburban Arizona residents haven’t gotten upset, there’s been relatively little news to make of the whole event, and so far none of the riders (who are under NDA) have found a reason to make a big deal over this.
One of questions Niedermeyer ponders is what threshold Waymo crossed that finally allowed for driverless vehicles, albeit in a tightly geofenced area.
“Waymo’s decision to put me in a fully driverless car on public roads anywhere speaks to the confidence it puts in its ‘driver,’ but the company wasn’t able to point to one specific source of that confidence….
‘Autonomous driving is complex enough not to rely on a singular metric,’ Panigrahi said.
It’s a sensible, albeit frustrating, argument, given that the most significant open question hanging over the autonomous drive space is ‘how safe is safe enough?’”
I’m not so sure I agree with Niedermeyer that the argument is “sensible”. Waymo’s response to the key question of what makes its vehicles safe enough to be driverless is, essentially, “trust us”.
And so far that works, at least for Waymo, which has done virtually everything right and caused no significant injuries, much less fatalities, in its ten years of existence.
Were Waymo to continue that trend indefinitely into the future, “trust us”, would continue to suffice.
Presumably, though, as Waymo ramps up miles and riders, collisions and injuries will happen. At that point, “trust us” probably won’t seem so sensible.
But all of that is in a hypothetical future. For now, I think it’s okay to celebrate and revel in what humanity is accomplishing.
I will present Teaching Autonomous Driving at Massive Scale at 9am on Sunday, October 27. WEinADT (as it is called) is part of the larger IEEE Intelligent Systems Transportation Conference.
Professor Alexander Carballo has done terrific work organizing the workshop and I am lucky to be a part of the agenda!
This will be my first time visiting New Zealand, and I am super-excited to participate in WEinADT and ITSC. If you’re going to be at ITSC, please swing by my presentation at 9am on Sunday to say hello!
If you happen to be in New Zealand, even if you won’t be attending ITSC, send me (david.silver@udacity.com) an email! I’d be delighted to meet some friendly faces in Auckland.
Reilly Brennan, a venture capitalist at Trucks.VC and one of the movers and shakers in the world of autonomous vehicles (seriously, look at that investment portfolio!), has a short post critiquing the naming regulations for advanced driver assistance systems.
“We’re probably using [driver assistance systems] the wrong way and I believe a significant contributor to that problem is the branding and marketing of these systems.”
In particular, Reilly points out that USDA food labeling standards are much more stringent than labeling standards for driver assistance systems, which don’t even really exist.
“But if you want to brand your car’s systems as Auto-magic-pilot-drive-yourself, there is little today that the US Department of Transportation or Federal Trade Commission will do to prevent you.”
He doesn’t quite prescribe a solution, but calls for “equal attention” between food labeling and vehicle systems, particularly because vehicle systems can kill other people on the road besides just the customer of the system.
I’m genuinely uncertain how to handle this myself, and the post is worth a read and a ponder.
On a recent episode of MergeNow, Ed Niedermeyer interviewed Jon Mullen of RightHook, an autonomous vehicle simulation startup. I worked with Jon at Ford, so I was particularly interested.
Jon was on the show describing ScenarioScript, “an open format scenario-describing language.” Think of ScenarioScript as a format for describing traffic scenarios for autonomous vehicles, including variables like weather, road dimensions, and other relevant parameters.
Early in the show, Ed asked Jon if the release of ScenarioScript is an attempt to move everyone onto RightHook’s ecosystem. Jon said that was not the case, and it’s worth listening yourself to hear why and decide whether you believe that.
What struck me, though, was the question of whether and why it ever would be remunerative for a company to move the world onto its chosen open-source ecosystem.
The best example I can think of this is Bell Labs, where Unix, C, and C++ were invented, along with lots of other things. Bell Labs seems to me to be understudied — the Wikipedia section on Nobel Prizes and Turing Awards is tremendous and must outstrip any other non-university in the world, certainly any for-profit entity.
But it’s less clear how much Bell (later AT&T, and now Nokia) benefited from these inventions. At the very least, the through-line from open-source creation to corporate profit requires some thinking.
Another, smaller, example is Willow Garage, the technology incubator that at one time maintained ROS, OpenCV, and PCL. All of those projects have been critical for self-driving car development, and robotics more generally. But Willow Garage dissolved as an entity in 2014.
The list could keep going. The success of Java was, at least, insufficient to prop up SUN. JavaScript didn’t save Netscape, or its eventual acquirer, AOL.
Perhaps the most prominent counterexample is Android, which has made Google lots of money (I think) via Google Play commissions on apps.
Other companies are centered around developing hosting and services for a particular open-source project. MongoDB Inc. does this for MongoDB, Elastic does this for Elasticsearch, and Databricks does this for Apache Spark. All of these companies have been quite successful, but in the long run, Amazon Web Services and other cloud providers look like real threats.
Looking over this list, I actually think the invention of JavaScript at Netscape is the most instructive. JavaScript was transformational for the browser industry, and the Internet generally. But the open-source nature of the tool may have limited the value that Netscape specifically was able to capture.
A similar case might pertain to Unix, C, and C++ at Bell Labs.
These tools were a tremendous benefit to the entire industry, and perhaps helped Netscape and Bell at the expense of alternative (TV and postal mail, respectively?). However, the benefit accrued to the entire industry, not only to the company that invented to the technology.
To bring this full circle, if you go back and listen to Jon Mullen’s rationale for open-sourcing ScenarioScript, that’s what he says 😉