

I’ve spent the past several days highlighting posts from Udacity Self-Driving Car students in areas related to computer vision, neural networks, careers, and more.
I’ll be doing more of that today, and for the next several days. Then we’ll return to our regularly scheduled programming, although I expect to periodically include more student posts each week.
Teaching a car to mimic your driving behaviour

Subodh summarizes his approach to building an end-to-end network for driving. He was even able to get his network to drive the car on a track it had never seen before!
The true test of a neural network is how well it performs on unseen data i.e. data not used in training. To evaluate this the simulator had a second track which was very different from the one used for training. It was darker, had slopes while the first track was more or less flat, had sharper turns and more right turns as compared to the first track. The network had never seen data from this track. However some of these differences were accounted for in the network due to image augmentation techniques described above.
Udacity Self-Driving Car Nanodegree Project 2 — Traffic Sign Classifier

Jeremy exploited some pretty cool data augmentation techniques to help his traffic sign classifier generalize better. As a consequence, his model was able to correctly classify many different images that he found on the Internet.
Wait… a hundred percent? Seriously? I don’t know how this model can be that sure of its prediction. Granted, I gave it some real softballs, there. But still, I would have expected them all to be in the 75–90% range. Whatever — I’ll take it! Good job, model!
Self-Driving Car Engineer Diary — 3
Andrew has a running journal documenting his journey through CarND. In this post, he provides great notes about the deep learning content the course provides in the run-up to the Traffic Sign Classifier Project.
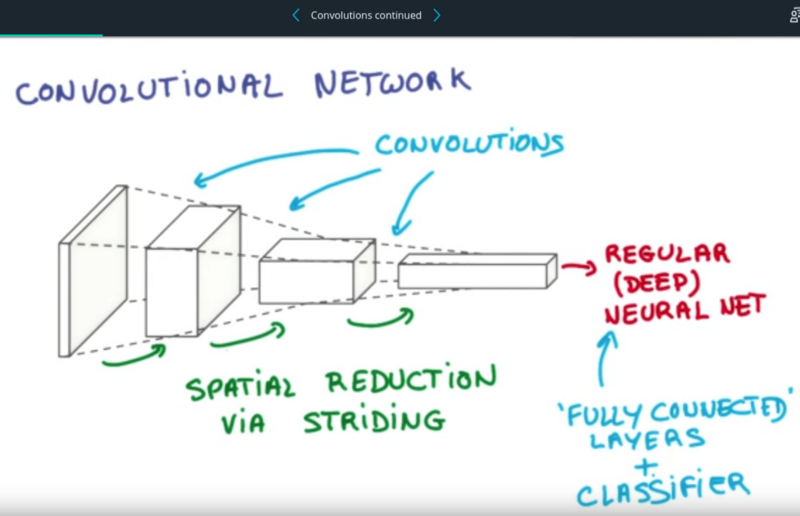
Hi. Dived into part 1 of Deep Learning during the last 2 weeks. The course covered a lot of material over 7 lessons, defined with succinct, well commented, executable code … just how I like it!
Neural Network Tuning with TensorFlow
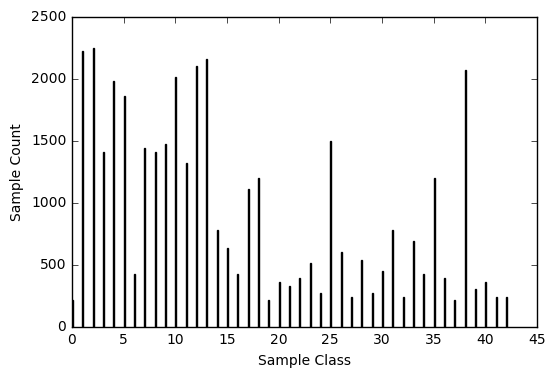
Param built a neural network to classify traffic signs and in the process, spent a lot of time thinking about how to size the network, preprocess the images, and tune hyperparameters.
Or, how I struggled with Project 2: Traffic Sign Classfication as part of the Self-driving Car Engineering Nanodegree from Udacity. In the end, the struggle taught me more than the results I got.
Docker Image for the Udacity Self-Driving Car Nanodegree (with UI)
One of the big challenges when we launched the program was helping to get everybody’s software packages working. We finally published the Udacity CarND Starter Kit, but we also rely on students like Youcef to help their fellow students by guiding them on setup.
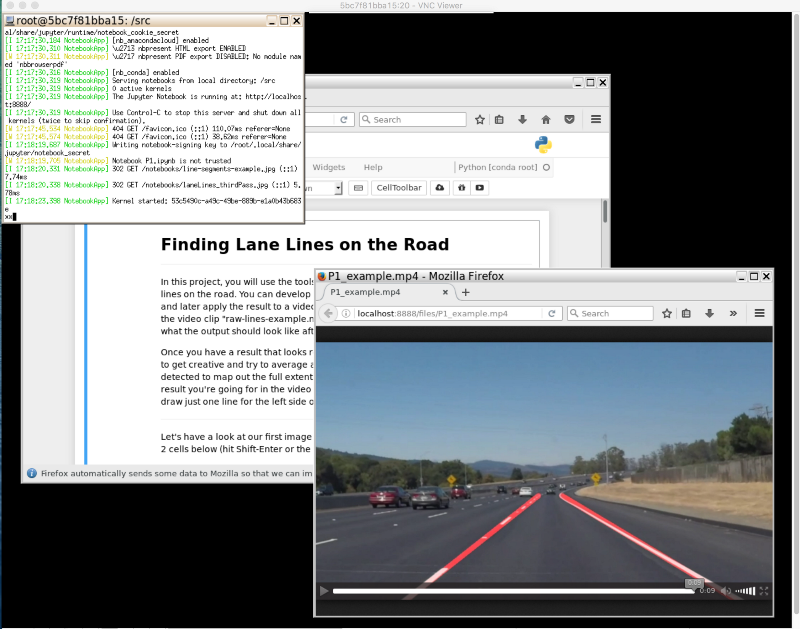
The image I created is at https://hub.docker.com/r/yrahal/udacity-carnd, and is built based on the install steps required for the Lane Lines Finding Project (first project of the Nanodegree). The Dockerfile I used to create the container is inspired from the Anaconda3 Dockerfile and on instructions on how to run a VNC server inside a container.
