

Here are five great posts from students in Udacity’s Self-Driving Car Engineer Nanodegree Program, dealing with generalizing machine learning models and hacking cars!
SDC
Daniel has devoted a section of his blog to the Self-Driving Car projects, including applying his lane-line finder to video he took himself!
The first project for the Udacity Self-Driving Car Nanodegree was to create a software pipeline capable of detecting the lane lines in video feed. The project was done using python with the bulk of work being performed using the OpenCV library. The video to the side shows the software pipeline I developed in action using video footage I took myself.
Traffic Sign Classifier: Normalising Data
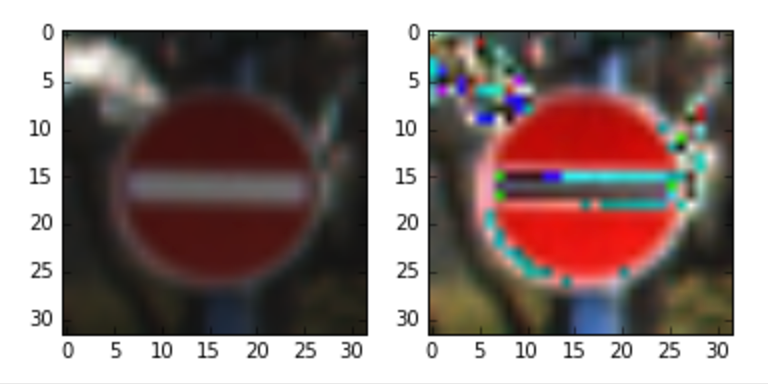
Jessica’s post discusses the need to normalize image data before feeding it into a neural network, including a bonus explainer on the differences between normalization and standardization.
The same range of values for each of the inputs to the neural network can guarantee stable convergence of weights and biases. (Source: Mahmoud Omid on ResearchGate)
Suppose we have one image that’s really dark (almost all black) and one that’s really bright (almost all white). Our model has to address both cases using the same parameters (weights and biases). It’s hard for our model to be accurate and generalise well if it has to tackle both extreme cases.
Hardware, tools, and cardboard mockups.

Dylan is a student in both the Georgia Tech Online Master’s in Computer Science Program (run by Udacity) and also in CarND. He’s also turning his own Subaru into a self-driving car! (Note: We do not recommend this.)
Below I’ve put together a list of purchases needed for this project. There will definitely be more items coming soon, at least a decent power supply or UPS. Thankfully, this list covers all the big-ticket items.
Jetson TX1 Developement Kit (with .edu discount) NVIDIA $299
ZED Stereo Camera with 6-axis pose Stereolabs $449 CAN(-FD) to USB interface PEAK-System $299
Touch display, 10.1” Toguard $139
Wireless keyboard K400 Logitech $30
Total $1216
Self-Driving Car Engineer Diary — 1
Andrew has a running blog of his experiences in CarND, including his preparation.
I REALLY want a deep understanding of the material so followed Gilad Gressel’s recommendation (course mentor): Essence Of Linear Algebra (for linear classifiers which is step 1 towards CNNs), Gradients & Derivatives (for back propagation understanding) and CS231n: Convolutional Neural Networks for Visual Recognition lectures (for full Neural Networks and Convolutional Deep Neural Networks understanding).
Comparing model performance: Including Max Pooling and Dropout Layers
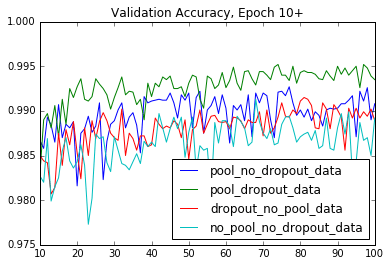
Another post by Jessica Yung! This time, she runs experiments on her model by training with and without different layers, to see which version of the model generalizes best.
Means of
training accuracy - validation accuracyin epochs 80-100 (lower gap first):
Pooling and dropout (0.0009)
Dropout but no pooling (0.0061)
Pooling but no dropout (0.0069)
No pooling or dropout (0.0094)
