

Udacity students are constantly impressing us with their skill, ingenuity, and their knowledge of the most obscure features in Slack.
Here are 6 blog posts that will astound you, and 1 think-piece that will blow your mind.
How to identify a Traffic Sign using Machine Learning !!
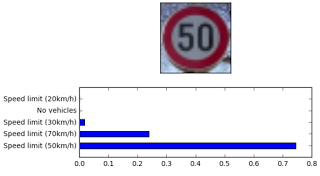
Sujay’s managed his data in a few clever ways for the traffic sign classifier project. First, he converted all of his images to grayscale. Then he skewed and augmented them. Finally, he balanced the data set. The result:
“The validation accuracy attained 98.2% on the validation set and the test accuracy was about 94.7%”
Udacity Advance Lane Finding Notes
An’s post is a great step-through of how to use OpenCV to find lane lines on the road. It includes lots of code samples!
“Project summary:
– Applying calibration on all chessboard images that are taken from the same camera recording the driving to obtain distort coefficients and matrix.
– Applying perspective transform and warp image to obtain bird-eyes view on road.
– Applying binary threshold by combining derivative x & y, magnitude, direction and S channel.
– Reduce noise and locate left & right lanes by histogram data.
– Draw line lanes over the image”
P5: Vehicle Detection with Linear SVC classification
Rana’s video shows the amazing results that are achievable with Support Vector Classifiers. Look at how well the bounding boxes track the other vehicles on the highway!
Updated! My 99.40% solution to Udacity Nanodegree project P2 (Traffic Sign Classification)

Cherkeng’s approach to the Traffic Sign Classification Project was based on an academic paper that uses “dense blocks” of convolutional layers to fit the training data tightly. He also uses several clever data augmentation techniques to prevent overfitting. Here’s how that works out:
“The new network is smaller with test accuracy of 99.40% and MAC (multiply–accumulate operation counts) of 27.0 million.”
Advanced Lane Line Project
Arnaldo has a thorough walk-through of the Udacity Advanced Lane Finding Project. If you want to know how to use computer vision to find lane lines on the road, this is a perfect guide!
“1 Camera calibration
2 Color and gradient threshold
3 Birds eye view
4 Lane detection and fit
5 Curvature of lanes and vehicle position with respect to center
6 Warp back and display information
7 Sanity check
8 Video”
Build a Deep Learning Rig for $800

I love this how-to post that lists all the components for a mid-line deep learning rig. Not too cheap, not too expensive. Just right.
Here’s how it does:
“As you can see above, my new machine (labeled “DL Rig”) is the clear winner. It performed this task more than 24 times faster than my MacBook Pro, and almost twice as fast as the AWS p2.large instance. Needless to say, I’m very happy with what I was able to get for the price.”
How Gig Economy Startups Will Replace Jobs with Robots
Companies like Uber and Lyft and Seamless and Fiverr and Upwork facilitate armies of independent contractors who work “gigs” on their own time, for as much money as they want, but without the structure of traditional employment.
Caleb makes the point that, for all the press the gig economy gets, the end might be in sight. Many of these gigs might soon be replaced by computers and robots. He illustrates this point with his colleague, Eric, who works as a safety driver for the autonomous vehicle startup Auro Robotics. Auro’s whole mission is to eliminate Eric’s job!
“Don’t feel too bad for Eric though. He’s become skilled with hardware and robotics. His experience working in cooperation with a robot can enable him to build better systems that don’t need explicit instructions.”
