One of the poorly understood complications in autonomous vehicles is how much work will be involved in transferring self-driving technology from one location to another.
Driving in the United States is much different than driving in India, and in fact driving in San Francisco is different than driving in Boston or Peoria. But it’s hard to get a handle on just how big a challenge this will be until we try to transfer self-driving technology to different areas.
Volvo is running (bouncing?) into some problems with their self-driving technology in Australia, according to this delightful article from The Australian Broadcasting Corporation.
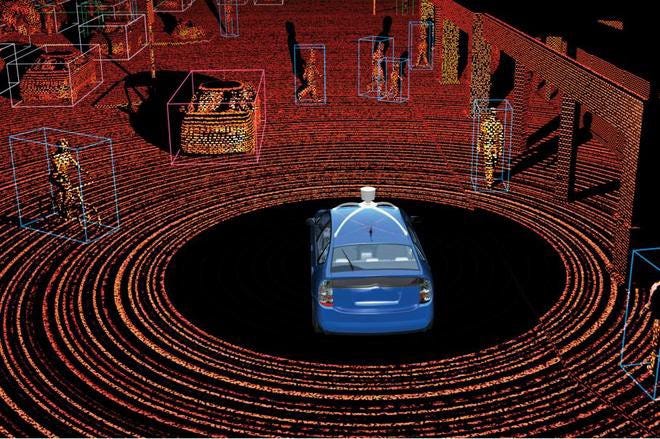
Apparently the object detection software for animals is thrown by the way kangaroos hop, which isn’t characteristic of the caribou that Volvo typically sees in Sweden.
“We’ve noticed with the kangaroo being in mid-flight … when it’s in the air it actually looks like it’s further away, then it lands and it looks closer,” Volvo Australia’s technical manager David Pickett said.
Not to worry, though. According to The Guardian:
“We are developing a car that can recognise kangaroos,” he said.